INTRODUCTION
As technology develops, computers are making people’s lives progressively easier and safer. Someday they will be able to drive automobiles, resulting in reduced deaths and accidents. We decided to make a prototype of a self controlled car. We started with a Hot Shot II radio control car and stripped out the radio receiver. Then we gained complete control over the drive and steering servos, allowing complete control of the car via the Atmel AVR8515 micro-controller.
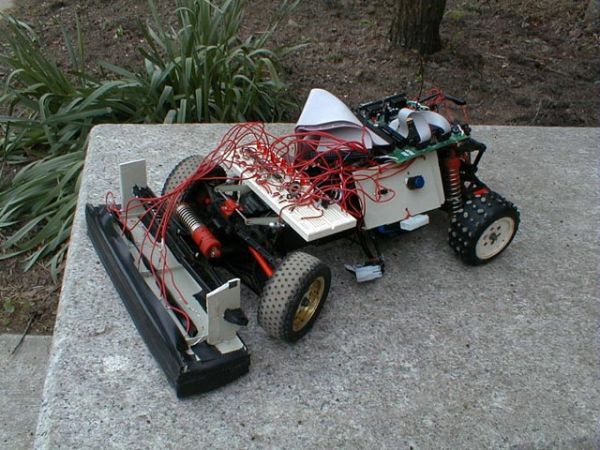
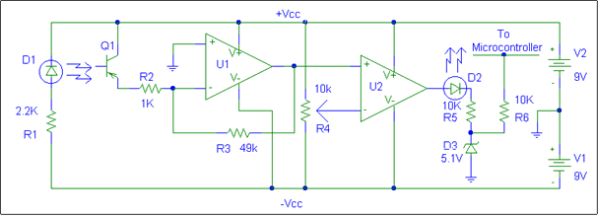
In order to choose a non-predetermined path, we set up an array of sensors that could detect a line against a luminance contrasting surface (ie: black line on white background). The micro-controller then sensed the position of the line relative to the car and steered accordingly. To maintain constant speed, a sixth light sensor detects wheel rotation. The PWM signal to the motor is adjusted to maintain the desired speed through a digital feedback algorithm, obtaining data from the wheel.
When the car looses the line, or gets to the end of the track, it automatically stops and enters a data upload state. The speed and steering data, recorded at 10 samples/second, can be uploaded to a computer and the car’s path can be reconstructed in MATLAB.
Features:
- Five element sensor array
- Complete control of drive and steering servos
- Speed feedback to maintain desired speed
- Maintains record of speed and steering to reconstruct the course
- Can follow dark path on light background or light path on dark background
For more detail: Autonomous Vehicle