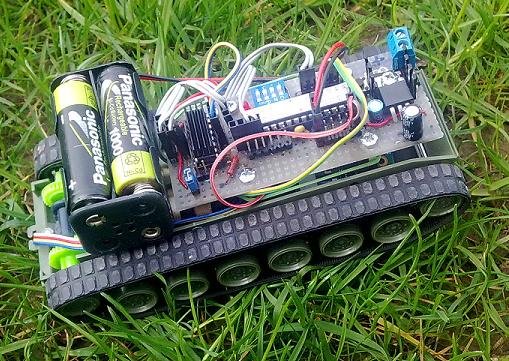
Fun Micro:bit Robot – EASY and Inexpensive!
BBC micro:bits are great! They are easy to program, they’re packed with features like Bluetooth and an accelerometer and they’re inexpensive. Wouldn’t it be great to be able to build a robot car that costs next to NOTHING? This project is inspired by the desire for elementary school students to be able to build robots […]
Fun Micro:bit Robot – EASY and Inexpensive! Read More »