REQUIREMENTS:
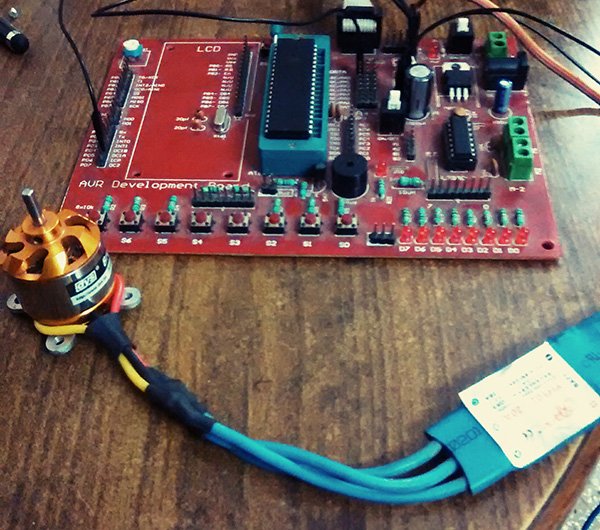
1. Microcontroller (AtMega 16)
2. A Brushless DC motor (BLDC)
3. An Electronic Speed Controller (ESC)
4. Power source to drive the motor (LiPo battery)
DESCRIPTION:
 For more detail: Controlling a BLDC Motor with an ESC
For more detail: Controlling a BLDC Motor with an ESC
Brushless motors have much more satisfying results as compared to brushed motors. The basic difference between them is that in a brushless motor, the rotor itself contains the permanent magnets and the electromagnets move to the stator which is quite opposite as seen in a brushed motors. It’s more precise and can also factor the speed of the motor into the equation. This makes brushless motors more efficient as there is no sparking, less electrical noise and no brushes to wear out. With the electromagnets on the stator, they are very easy to cool. You can have a lot of electromagnets on the stator for more precise control. The only disadvantage of a brushless motor is its higher initial cost, but you can often recover that cost through the greater efficiency over the life of the motor.
Now when we talk about controlling these motors I would like to introduce a new term, i.e. ESC which stands for Electronic Speed Controllers. As the name suggests, they control the speed of brushless DC motors using some electronic protocol. These ESCs need a command to work further. In this project I’m sending these commands using a microcontroller, AtMega 16. You might be thinking what these command could be? Don’t worry, if you have ever dealt with servo motors before, you’ll be able to control these BLDC motors very easily. Most of the ESCs need a 50Hz frequency i.e. a 20 ms cycle and the speed depends upon the duty cycle you provide. 1ms will reduce its speed to minimum or even stop it (it depend upon the ESC model) while a 2ms pulse will run the motor on its full speed. The values between them give you a variation in speed.
Schematic
 For more detail: Controlling a BLDC Motor with an ESC
For more detail: Controlling a BLDC Motor with an ESC