JAKE WACHLIN DEMONSTRATES HIS CAN CONTROLLED DUAL CLOSED- LOOP MOTOR CONTROLLER
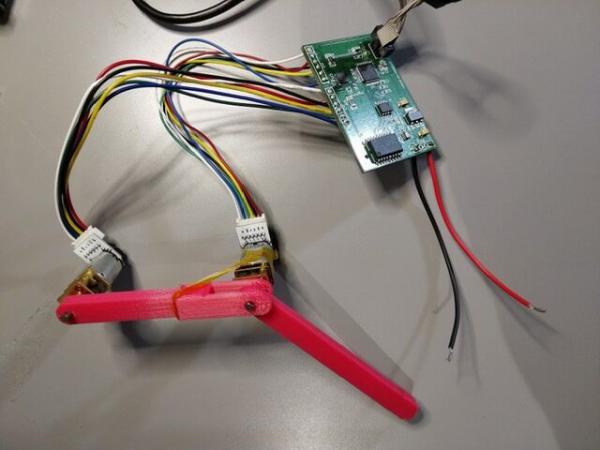
Jake Wachlin has posted on Hackaday a CAN Controlled Dual Closed-Loop Motor Controller. CAN is an acronym for Controller Area Network. This is a robotic vehicle bus standard designed to enable microcontrollers and devices to communicate with each other’s applications without a host computer. This mechanism is implemented in the CAN controlled dual closed-loop motor controller. This controlled dual closed-loop […]
JAKE WACHLIN DEMONSTRATES HIS CAN CONTROLLED DUAL CLOSED- LOOP MOTOR CONTROLLER Read More »