Summary of Phase Correct PWM (Pulse Width Modulation) Mode of AVR microcontroller Timer
This article explains how to generate a 75% duty cycle PWM signal using the Phase Correct PWM mode of the AVR ATmega16 microcontroller's Timer0. The dual-slope counting method of this mode offers symmetric wave generation ideal for motor control. The PWM output is observed on the OC0 pin connected to a CRO. The frequency of the PWM signal is calculated based on the crystal frequency and prescaler settings. The article includes programming steps, source code, and circuit diagram for implementing the project.
Parts used in the Phase Correct PWM Mode Generation Project:
- ATmega16 microcontroller
- Crystal oscillator (12 MHz)
- Current Regulator (CRO) or Oscilloscope
- Connecting wires and breadboard or PCB
- Power supply for microcontroller
Pulse Width Modulation is well known technique for controlling power electronics devices like SCR, IGBT etc. PWM is also used in motor speed controlling. Square wave generation by using AVR timers is explained in previous article. The AVR timers have feature of PWM wave generation as well .This article describes PWM generation capability of AVR timers.
There are four in-built PWM channels in ATmega16. The PWM outputs are received on pins OC0, OC1A, OC1B and OC2. Readers can refer the previous article which gives explanation of these pins. There are two modes of operation of AVR timer which are able to generate PWM signal.
1. Phase correct PWM mode
PWM generation by Phase correct PWM mode:
The Phase correct PWM mode can be selected by assigning bits WGM0[1:0]=01. This mode is based on dual slope operation. In dual slope operation, TCNTn counts from bottom value to maximum value and maximum value to bottom value. The OCRn register compares the value with the TCNTn register constantly during up-counting and down-counting. On compare match PWM output pin (OCn) behaves according to inverting or non-inverting mode which can be selected by programming of COMn [1:0] bits. The following table shows bit setting of COM [1:0] bits:
Phase correction PWM mode is preferred for motor controlling because dual- slope operation provides symmetric wave generation. Duty cycle of pulse can be varied by writing the values to OCRn register. The OCRn value can be calculate by the following formula:

For example: if duty cycle is 75%
OCR value = (75÷100) × 256
Frequency of PWM output will be
Frequency of PWM output will be
Objective : Generate PWM signal of duty cycle 75% from timer 0.
Circuit description:
The connection of ATmega16 is shown in circuit diagram. Since, Timer0 is used to generate PWM wave then output is taken on OC0 pin, so pin no.4 is connected to C.R.O to observe the waveform.
Programming steps:
1. Select Phase Correct PWM mode by programming WGM0 [1:0] bit.
2. Program COM0 [1:0] bit and select inverting or non-inverting mode .
3. Set OC0 pin as output pin.
4. Set OCIE0 bit of TIMSK register.
5. Enable global interrupt by “sei()” command.
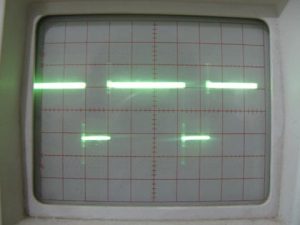
Output wave:
Frequency calculation by formula:
Output frequency = Crystal frequency÷(Prescaler ×510)
= 12000000÷(1×510)
= 23529.41 = 23.53KHz
The following picture shows the output wave form which is received on CRO. The measured frequency of wave is 23.54 KHz.
Project Source Code
###
// Program to use Phase Correct PWM (Pulse Width Modulation) Mode of AVR microcontroller Timer
#include<avr/io.h>
#include<util/delay.h>
#include<avr/interrupt.h>
#define FREQ 12000000
#define duty_cycle 75 // duty cycle require
#define prescaler 1
#define OCR_value ((duty_cycle*256)/100)
void t0_pwm_init(void);
int main()
{
t0_pwm_init();
sei(); // enable global interrupt
while(1);
}
void t0_pwm_init() //// intiatialize of timer0
{
// WGM0[1:0]= 01, for Phase Correct PWM mode
// COM0[1:0]= 10, to select non inveting mode
// CS0[2:0] =001. for no prescaler
TCCR0=(1<<WGM00)|(2<<COM00)|(1<<CS00);
DDRB|=(1<<PB3); // selcetOC0 as output pin
TIMSK|=(1<<OCIE0); //enable Output compare interrupt
}
ISR(TIMER0_COMP_vect) // interrupt subroutine
{
OCR0=(uint8_t)OCR_value; // put OCR value
}
###
Circuit Diagrams
Circuit-Diagram-of-Phase-Correct-PWM-Pulse-Width-Modulation-Mode-of-AVR-microcontroller-Timer