Introduction
In short, our project is just an isolated floating plate. Just as our title explained, it is mainly a floating plate that is segregated from all outside vibration using electromagnetic force.
This purpose of the project is to design a system that complements common passive shock absorption mechanics and enhances their performance.
The main idea of the project is that if we can provide instant support for any load putting on a plate and maintain a constant supporting force when the system reach balance, we can isolate all the background mechanical vibration. To achieve the best result, we choose a hybrid of electromagnets and permanent neodymium magnets to provide supporting force and use PID feedback loop to control the system so we can reduce the power consumption of the system.
High Level design
Rationale
As we can see, there are many situations that requires absolute vibration free environment, for example, Electron Scan Microscope. Traditional passive shock-absorption systems take a large amount of space and needs very expensive equipments. So we want to provide a small, inexpensive solution for those occasions. Furthermore, active anti-shock system has a better performance than the traditional passive anti-shock system because electromagnets can let the system go back to its balanced position faster than normal springs can do.
Background Math
The key algorithm for this project is the PID feedback loop. The PID loop controls the magnetic strength of the three electromagnets using the feedback from the two horizontal sensors.
PID controller
A proportionalCintegralCderivative controller (PID controller) is a generic control loop feedback mechanism widely used in industrial control systems. Generally speaking, a PID controller calculates the “error” value as the difference between a measured process variable and a desired value. The controller attempts to minimize the error by adjusting the control inputs. In the absence of an explicit function between the inputs and the outputs, PID controllers are the best controllers.
The PID controller calculation involves three separate parameters: the proportional, the integral and derivative values, denoted P, I, and D. The proportional value determines the reaction to the current error, the integral value determines the reaction based on the sum of recent errors, and the derivative value determines the reaction based on the rate at which the error has been changing.
By tuning the three constants in the PID controller, the controller can provide control action designed for specific process requirements. The response of the controller can be described in terms of the responsiveness of the controller to an error, the degree to which the controller overshoots the set point and the degree of system oscillation.
Standards and Patents Involved
We did a Google search using key word electromagnetic levitation balancing active anti-shock PID and found that there are not many articles on our topic.
Although Lorenz Levitation is an active research area, there does not seem to be any standard and patents on it.
In addition, we are using a DC electromagnet so there is no problem with RF standard and we did not find any standard on static magnetic field.
Hardware Design
Mechanical Parts
Self made platform
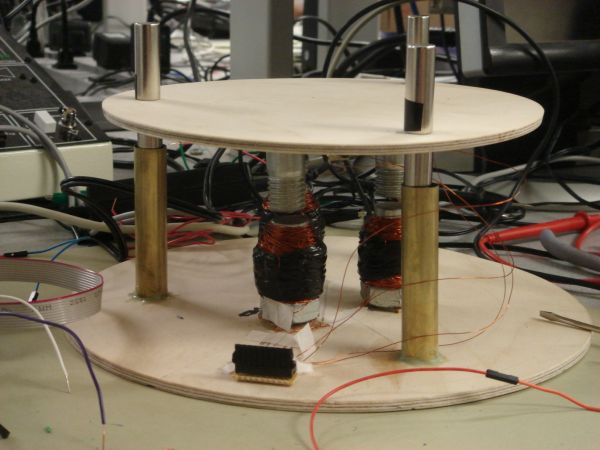
We carved two circle plates and cut three equal length brass tubes. The larger plate is used as the base and the small plate is used as the floating plate. The brass tubes are cut into appropriate length to prevent the floating plate from moving horizontally freely. Three pairs of 0.5 diameter and 1.5 length neodymium magnets are put into the brass tubes. Three of the magnets are glued on the base in a equilateral triangle way and the other three are glued on the floating plate on the corresponding positions. And we use the pushing force between them to complement the gravity of the floating plate. Three electromagnets are glued on the base in a reversed equilateral triangle way and the electromagnets are 60% closer to the center of the base than the magnets and three iron rods are placed on the floating plate on the corresponding positions. The base adjusts the floating height and the inclination angle of the floating plate by controlling the pulling forces of the three electromagnets. The reason why we place the electromagnets closer to the center of the base is from experiment we found even a huge amount of power (as high as 30 Watts for each electromagnet), the magnetic forces of the electromagnets are still much smaller than the powerful neodymium magnets. So if we make the distances between the electromagnet and the iron rod equal to the distance between the two pushing neodymium magnets at their balanced position, the pulling force between the electromagnet and the iron rod will be very weak and not effective enough. So we need to make the distance between the electromagnet and the iron rod nearer. However, this will make the inclination angle range of the floating plate smaller because the electromagnet and iron rod will hit each other at large inclination angle. To solve this problem, we move the electromagnets closer to the center and in this way the inclination angle range increases due to the lever effect. From experiments we also noticed that the magnetic force between two magnetic materials increases sharply as the distance between them decreases. So the magnetic force between the electromagnet and the iron rod is still strong enough to control the floating plates position, even if they are placed close to the center of the base. The model picture below is drawn using 3ds max.
High Level Schematic

Custom PC Board for Mega644
To interface the ATMega644 with our circuitry, a custom PCB is used.
The PC board mainly provides the power supply and serial interface for the ATMega644/32. It uses a LM340LAZ-5.0 power regulator to provide 5V power for ATMega644. The 16MHz Crystal provides external clock reference. The board also gives programming header (PGM) and an LED connected between pin D.2 and ground for debugging. The connection we used is as follows.
Self made 21.5 Ohms electro magnets
At first we tried to use the neodymium magnets as the cores of the electromagnets because neodymium has very high magnetic permeability but from experiment we found the electromagnets are too weak to conquer the neodymium magnets. So we cut several 3/4 diameter bolts into iron rods and use them as the cores of the electromagnets. Also, due to the power supply limit, we need to make the electromagnets has high voltage and passes low current to achieve high power. From experiment, we found the appropriate maximum power for the electromagnets are about 30 Watts each. We use #28 magnetic wire to build the coils and the maximum current #28 wire can pass is 1.4 amps. In this case, finally we decided the resistance of the coils to be 21.5 ohms each and the maximum voltage we can add between its two ends is about 25 Volts. It really took us some time to build the coils because the resistance of #28 wire is about 0.212 ohm/meter so we need 100 meters of wire for EACH coil! In this we can build strong electromagnets and avoid burning the coils. Even the maximum current through the coil is only 1.2 amps, the coils will still become hot after some time. For good heat dissipation, we add three heat sinks for each electromagnets and high-performance Arctic Silver-TM 5 thermal grease is used for good contact between the iron cores and the heat sinks. We cascade three 12V 2.5A power supplies into one for an electromagnet.
Parts List:
| Part number | Vender | Price |
| ATmega644 | Atmel | $6 |
| Custom PC Board | Bruce | $4 |
| Solder Board (6 inch)*3 | Bruce | $2.5*3=$7.5 |
| Small Solder Board (2 inch) | Bruce | $1 |
| DIP Sockets*4 | Bruce | $0.5*4=$2 |
| Pins | Bruce | $0.05*100=$5 |
| Power Supply 12V*3 | Bruce | $5*3=$15 |
| Wooden Boards | Cornell Store | $6 |
| Brass Tube | Cornell Store | $1 |
| Magnets | EBay | $1*9=$9 |
| MMA2260D Accelerometer | Donated by Freescale | Free |
| LM358*3 | Lab | Free |
| LM675*3 | Sampled from National Semiconductor | Free |
| Bolts | Winter Lab | Free |
| Total | $56.5 | |
| Budget Available | $75 |
For more detail: Self-Adaptive Hybrid Electro-Magnetic Levitation and Active Balancing System Using Atmega644