Summary of Automatic Egg Incubator
Summary: This project implements an Automatic Egg Incubator using an Atmel AVR ATMEGA32 to control temperature, humidity, ventilation, and egg turning. It uses DS1631 digital thermometers, a DS1307 RTC, LM35 for flame monitoring, ADC-based chick-sound detection, motor-driven controls, kerosene wick lamp heating, and PC configuration via USART. The system supports battery backup, relay switching, and solar power, with safety alarms and automated routines for mixing, aeration, rotation, and hatch detection.
Parts used in the Automatic Egg Incubator:
- ATMEGA32 microcontroller
- DS1631 digital thermometer chips (two units)
- DS1307 real time clock (RTC)
- LCD display
- LM35 temperature-to-voltage converter
- Condenser microphone
- ADC (on ATMEGA32) for sound and temperature sensing
- DC motors for rotation, mixing, and aeration
- Motor driver chips
- Motorised kerosene wick lamp (with motor control)
- Separate voltage regulator for motor supply
- NiCd battery backup
- Relay for switching between rectifier and battery
- Rectifier and smoothing capacitor (2200uF)
- 12V solar panel (optional power source)
- Simple gear from a mechanical clock (for torque)
- Siren (alarm) output
- Push button (alarm acknowledge)
- Connectors and main controller PCB (including small ATMEGA32 board with 11-pin connectors)
Many factors contribute to the high demand for egg incubator around the world. A person who is interested in birds would like to raise ornamental birds, but he couldn’t find or obtain a broody bird as such; nonvegetarians eat birds, but they are often forced to eat birds raised through artificial injections; and in many cases, even if we have an egg in hand, we can’t hatch the egg naturally because it is difficult to find the bird and get it hatched, etc. All of these factors highlight the significance of the Automatic Egg Incubator project.
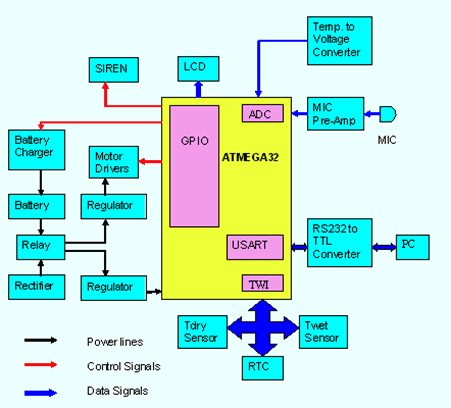
The project represented here uses ATMEL AVR ATMEGA32 to implement an Automatic Egg Incubator. Incubation temperature, relative humidity inside the incubator, ventilation, and egg turning are the four main parameters in any bird hatching. The hatching temperature, optimum relative humidity, the number of days for hatching, and other factors are determined by the bird species. The incubation area is a sealed chamber with a variety of mechanisms and controls. For easy egg rotation, there is a carrier that holds the eggs inside the chamber.
Each of the four vectors mentioned above is so important that failure in any of them can result in the loss of the entire hatch. The temperature of the incubation determines the batch’s quality. Low and high temperatures both reduce hatchability and result in weak chicks. Keeping the incubation temperature at the optimal level is therefore critical. Mixing maintains temperature and humidity uniformity within the chamber, preventing any factors from becoming localized. Aeration introduces new oxygen into the system while removing carbon dioxide gas produced by eggshells. Egg turning ensures that the albumen is thoroughly mixed in order to provide adequate nutrients. When viewed holistic way, all of the above factors are important, and overall stability must be achieved by adjusting all of them. AVR ATMEGA32 maintains this equilibrium perfectly by using the features and peripherals available to it.
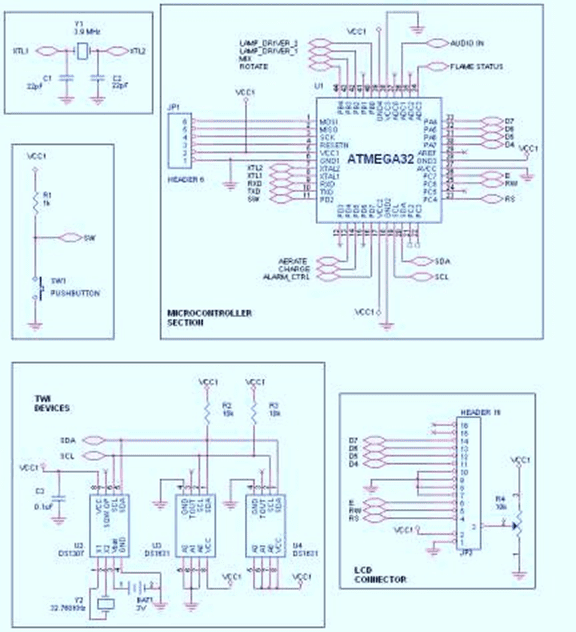
The design files and related documents describe how the entire system is configured and how ATMEGA32 manages those four vectors. There are two digital thermometer chips. The DS1631 serves as dry and wet electronic thermometers, the DS1307 serves as the system’s timekeeping RTC, and the LCD provides the live status of the incubator. The ATMEGA32 microcontroller’s TWI is used by both digital thermometer chips and the RTC.
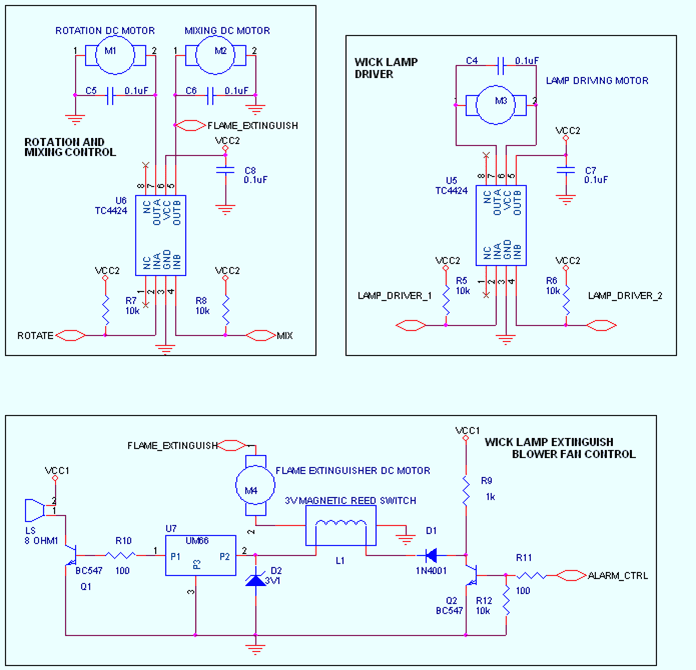
The temperature of the chamber is controlled by a motorised kerosene wick lamp. AVR controls the exposure of the wick based on the wet temperature reading to keep the temperature within the range. The dry and wet electronic thermometer readings are used to calculate relative humidity, which is then used to determine the duration of aeration. RTC controls the overall timing of the system, which includes aeration, air mixing inside the chamber, egg rotation, tracking the number of days, and so on.
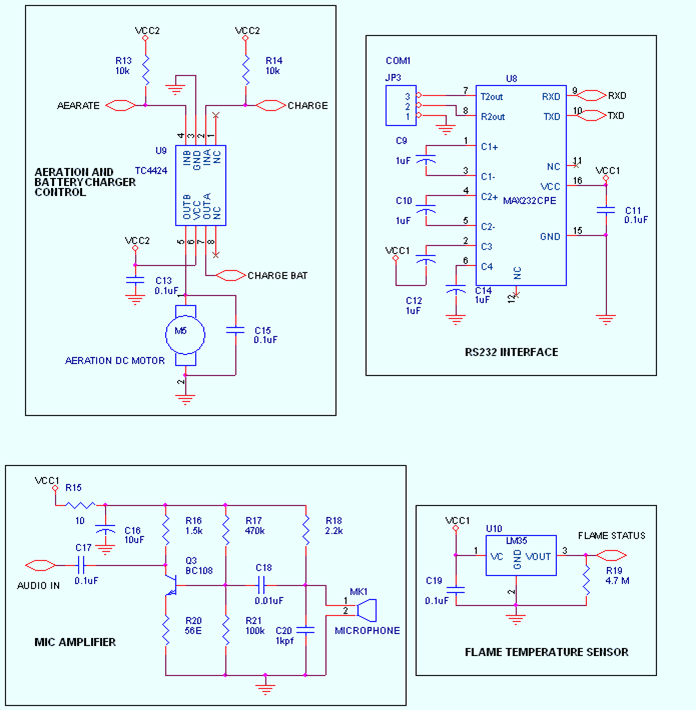
Other features of the system include: signaling the first hatch and monitoring the baby by detecting the sound of the baby bird once it breaks the eggshell. This feature is implemented using the ATMEGA32 ADC. Sound is captured with a condenser microphone, amplified, and fed into the ADC input. The risk of a motor-driven wick lamp malfunction is monitored using an LM35-based temperature-to-voltage converter, with the voltage fed to another ADC channel. In the event of a wick lamp, a siren will sound, and a C application has been developed to configure the number of days for hatching, temperature, and other parameters based on the bird. The serial communication protocol between the PC and the AVR is implemented using ATMEGA32’s USART module.
DC motors with motor driver chips are provided for rotation, mixing, aeration, and wick lamp control. For these motors, a separate voltage regulator is provided to prevent spurious signals and momentary currents from entering the AVR supply line. A simple gear from a mechanical clock is used to provide the necessary torque.
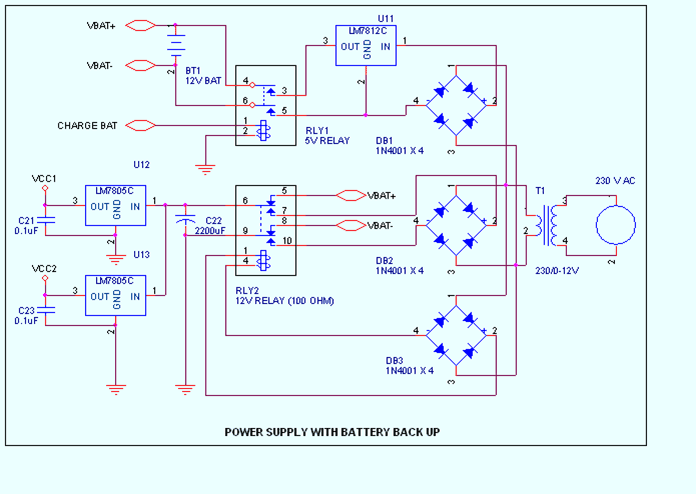
The entire board is powered by a 5V supply. In normal operation, the system is powered by a 230V line through rectifiers that convert AC to DC. During power outages, the system is powered by a NiCd battery backup. A relay controls the switching between the rectifier supply and the battery supply. A 2200uF capacitor installed on the rectifier output empowers switching without causing voltage fluctuations. Along with the RTC, AVR manages battery charging intervals.
Although there are many incubators on the market, most of them are out of reach for the average person, and many of them rely on heating coils that require an AC power supply. These incubators cannot be used in remote areas with frequent power shortages. As a solution to this problem, this project employs a more reliable kerosene lamp-based design. In remote locations, the entire control circuit and related devices can be powered by a 12V solar panel.
Assembly of Project

(Figure above shows the main controller board of the Automatic Egg Incubator. ATMEGA32 sits at the center. It is on a small board that is placed below the main board and is soldered to the top using four 11-pin connectors).
(Figure above shows the full system view. The Main Controller board is inside the rose box. ATMEGA32 can be seen through the slit. The figure shows other parts of the system). The electronic components used in circuits are common.
Block Diagram
Schematics Diagrams
Visit recommended site for ICs (Integrated Circuits)
Code snippet:
//code section which monitor wick lamp flame temperature
adc_capture(0x03);
while(!(ADCSRA & (1<<ADIF))); while(adc_complete_flag != 1); adc_complete_flag = 0; dont_mix = 0; if (value > 280) //if LM35 sensor reads higher than 70 degrees
{
clear_bit_ALARM_CTRL(); //switch on siren
set_bit_MIXIGCNTRL(); //turn on blower fan to extinguish lamp
for (i=0;i<5;i++)
delay(400000);
//flame will be put off by this time
clear_bit_MIXIGCNTRL();
siren_status = 1;
}
if (value < 200) //if LM35 sensor reads below 50 degrees
{
clear_bit_ALARM_CTRL(); //switch on siren
dont_mix = 1; //since magnetic reed switch is on, mixing
signal will
//put off wick lamp flame..so
disable mixing for the time
//being
siren_status = 1;
}
if (siren_status == 1)
{
if ( (PORTD & 0x04) == 0x04) // push button pressed
set_bit_ALARM_CTRL();
}
//code section which detects first hatch
adc_capture(0x01);
while(!(ADCSRA & (1<<ADIF))); while(adc_complete_flag != 1); adc_complete_flag = 0; if(value > 200)
{
// counter to ensure sound is really produced by chick
//expects sound to be repeated 10 times in 5 minutes
if (sound_counter == 0)
{
sound_minute_trigger = Minute_current + 0x05;
if (( sound_minute_trigger & 0x0F) > 0x09)
sound_minute_trigger = sound_minute_trigger + 0x06;
if (sound_minute_trigger > 0x59)
sound_minute_trigger = 0;
}
sound_counter++;
if (sound_counter == 10)
{
I2CSendAddr(RTCADDR,WRITE);
I2CSendByte(0x10); // store first hatch details starting from this
location
I2CSendByte(Minute_current);//first hatch happened at this minute
I2CSendByte(HR_current); //in hour
I2CSendByte(Date_current); //at this date
I2CSendByte(Month_current); //of this month
I2CSendStop();
sound_counter = 0;
}
}
if ((Minute_current == sound_minute_trigger) && (sound_counter < 10))
sound_counter = 0;
cmdroutine(0xCD);
dataroutine(' ');
- What microcontroller is used in the Automatic Egg Incubator?
The ATMEGA32 microcontroller is used to manage temperature, humidity, ventilation, egg turning, timing, and communication. - How is temperature measured in the incubator?
Temperature is measured using two DS1631 digital thermometer chips and an LM35 for wick flame monitoring. - How is relative humidity determined?
Relative humidity is calculated from the dry and wet DS1631 electronic thermometer readings. - How does the system detect the first hatch?
First hatch is detected by capturing sound with a condenser microphone, amplifying it, and reading it via the ATMEGA32 ADC, then logging the event to the RTC when criteria are met. - What is used to heat the incubation chamber?
A motorised kerosene wick lamp is used for chamber heating, with AVR controlling wick exposure. - How are eggs turned and air mixed inside the chamber?
DC motors driven by motor driver chips perform egg rotation and air mixing, with a clock gear used to provide torque. - What happens during power outages?
The system switches to a NiCd battery backup via a relay, with a 2200uF capacitor smoothing switching, and AVR manages battery charging intervals. - Can the incubator be used in remote areas without reliable AC power?
Yes, the design uses a kerosene lamp for heat and the control circuit can be powered by a 12V solar panel, making it suitable for remote areas. - How can incubation parameters be configured?
A PC application communicates with the AVR over USART to configure number of days, temperature, and other bird-specific parameters. - How does the system respond to wick lamp malfunction?
LM35 monitoring triggers the AVR ADC; if abnormal temperatures are detected the system sounds a siren and may disable mixing or switch blower fan to extinguish the lamp.