Summary of Android-Powered Smart Wheelchairs
This article details a smart wheelchair project designed to enhance mobility for the elderly and disabled by integrating smartphone control. The system utilizes two primary input modes: an accelerometer for gesture-based movement and a touchscreen interface for directional commands. Both methods transmit signals via Bluetooth to an ATmega32 microcontroller, which drives DC motors through an L293D driver while IR sensors ensure obstacle detection. The design aims to overcome the bulkiness of traditional wheelchairs by using compact components like fingertip-mounted accelerometers and Android applications.
Parts used in the Smart Wheelchair Project:
- Android Smartphone
- Accelerometer Sensor
- Touchscreen (5-wire resistive type)
- Bluetooth HC-05 Module
- ATmega32 Microcontroller
- MAX232 IC
- L293D Motor Driver IC
- Two DC Motors
- Crystal Oscillator
- 12V DC Battery (5A output)
- IR Sensor Pairs
- Brake Control Switch
- Input Selection Switch
1. INTRODUCTION
A growing number of elderly and disabled individuals seeking to enhance their mobility find wheelchairs to be the most effective assistive device. For those with mobility challenges, a wheelchair provides the convenience of moving around, either propelled by another person or by the user’s physical force or electronic means. Traditional wheelchairs, however, come with limitations related to flexibility, bulkiness, and limited functions. Our approach aims to address these shortcomings by integrating technology, allowing users to control the wheelchair through smartphones for enhanced comfort and ease of use.
While some existing wheelchairs incorporate computers for gesture recognition, this integration often results in increased weight and complexity. To mitigate these issues, our solution leverages accelerometers, which are compact in size and can be easily placed on the fingertip of the users, reducing complexity and maintaining a lightweight design.
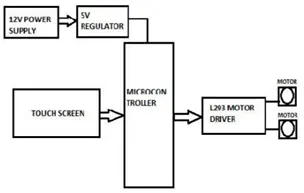
2. BLOCK DIAGRAM
The system is divided into two primary components: the Transmitter part and the Receiver part. In the Transmitter part, input is generated through an Android-based software application. This digital output is then transmitted to the microcontroller using Bluetooth interfacing with the module. The module is affixed to the wheelchair, and the command is subsequently sent to the Receiver side via the RF transmitter. Figure 1 illustrates the block diagram depicting the overall functioning of the device. DC Motors, linked to the controller through device drivers, govern the wheelchair’s direction.
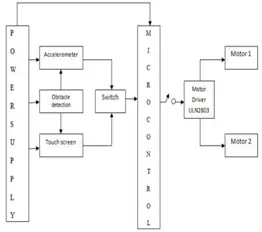
The device operates based on three parameters:
1. Accelerometer
2. TouchScreen
3. Obstacle Detection
-
ACCELEROMETER
An accelerometer serves as a motion sensor, measuring the acceleration applied to a device. In this context, we employ an accelerometer in conjunction with an Android application installed on a mobile phone. The motion of the mobile phone serves as input to the accelerometer, resulting in changes along the X, Y, and Z axes in three-dimensional space. Consequently, the accelerometer functions to capture this movement. In this setup, the acceleration of the mobile phone dictates the movement of a wheelchair. The interface between the accelerometer and the wheelchair is established through Bluetooth connectivity.
-
TOUCHSCREEN
The touch screen software is created using the Eclipse IDE platform. Commands for wheelchair movement are generated based on the specified direction input. The obstacle detection path is integrated with both the accelerometer and touch screen modes. The locomotion table outlines the wheelchair’s movement corresponding to the generated commands. Key-letter associations stored in the buffer IC kit are employed to guide the wheelchair in the specified direction, as detailed in Table 3.2.1.
The touch screen input in the proposed system is of the 5-wire resistive type, featuring five keys. Additionally, a brake control switch is utilized to halt the wheelchair when operating in this mode.
Upon powering up the system, the user selects the desired input mode through the input selection switch. The chosen mode is then displayed on the mobile phone screen. In this scenario, the touchscreen mode is initiated, and the accelerometer is set to stop mode. Once the microcontroller identifies this input, it activates the rear-end motors of the wheelchair when a command is executed, causing the wheelchair to move in the designated direction indicated by the touched key on the screen. Each key on the touchscreen corresponds to a specific range of values for different directions, and these values are encoded in the microcontroller, with the results displayed on the mobile phone screen.
Upon recognizing the specific value associated with the selected key, the relay circuit is activated using a logic switch. This, in turn, powers the DC motors attached to the rear end of the wheelchair. To prevent collisions, a brake switch is available to bring the wheelchair to a stop when needed. Pressing key 5 is the designated action to stop the wheelchair.
-
OBSTACLEDETECTION
Detecting obstacles is a crucial factor for verifying any irregularities in the trajectory of the device. For obstacle detection, pairs of IR sensors are positioned at the front and the diagonal ends. The IR sensor at the front end is responsible for identifying collisions with walls or obstacles. The effective range of these IR pairs is specified in the data sheet. The front end sensor pair can accurately sense obstacles at a distance of approximately 15 cm when operating at 2.8 V.
4. HARDWARESPECIFICATION
-
TWODCMOTORS
The fundamental principle of a DC motor lies in the interaction between a current-carrying conductor and a magnetic field. When such a conductor is situated within a magnetic field, it undergoes a torque and exhibits a tendency to move, a phenomenon known as motoring action. Reversing the direction of current in the conductor leads to a corresponding reversal in the direction of rotation. The operation of a DC motor is rooted in the generation of a mechanical force resulting from the interaction between the magnetic and electric fields.

The ATmega32, belonging to Atmel’s Mega AVR family, is an 8-bit high-performance microcontroller. It operates on RISC architecture and features 131 powerful instructions, with most instructions executing in a single machine cycle. The ATmega32 can operate at a maximum frequency of 16MHz. This microcontroller is equipped with 2KB of static RAM, 1KB of EEPROM, and 32KB of programmable flash memory. Notably, the endurance cycle for the flash memory is 10,000, and for the EEPROM, it is 100,000.

The MAX232 IC is employed to convert TTL/CMOS logic levels to RS232 logic levels when facilitating serial communication between microcontrollers and PCs. While the controller operates at TTL logic levels (0-5V), serial communication in PCs adheres to RS232 standards. This incongruity poses a challenge in establishing a direct link for seamless communication between the two.

The L293D is an integrated circuit (IC) that serves as a dual H-bridge motor driver. In the realm of motor control, H-bridge drivers act as current amplifiers by taking a low-current control signal and delivering a higher-current signal, enabling effective motor operation.
-
CRYSTALOSCILLATOR
A crystal oscillator is an electronic circuit that leverages the mechanical resonance of a vibrating crystal made of piezoelectric material to generate an electrical signal characterized by a precise frequency.
-
POWERSUPPLYBATTERY

A DC power supply is characterized by providing a constant-polarity voltage (either positive or negative) to the connected load. Its power source may vary, as it can be powered from either a DC source or an AC source, such as the power mains. In this context, a 12V battery supply with a maximum output of 5A is utilized.
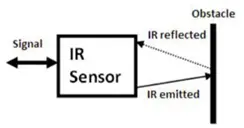
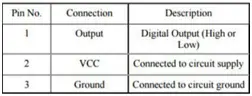
The IR Sensor serves as a versatile proximity sensor with a primary application in collision detection. Consisting of an IR emitter and IR receiver pair, this module is equipped with a highly sensitive IR receiver that consistently detects IR signals. Utilizing a 358 comparator IC, the module produces a high output when exposed to IR frequency and a low output otherwise. An on-board LED indicator facilitates status verification without requiring additional hardware. With low power consumption, this module provides a digital output.
Pin configuration:
4.10 BLUETOOTHHC05 (INTERFACING)
The C-05 module is a user-friendly Bluetooth SPP (Serial Port Protocol) module crafted for a straightforward serial connection setup. This Bluetooth system is fully compliant with Bluetooth V2.0+EDR (Enhanced Data Rate), offering a 3 Mbps modulation, and operates on a 2.4GHz radio transmission-reception and baseband. Utilizing CSR Bluecore 04-External single-chip Bluetooth technology with CMOS technology and incorporating an Adaptive Frequency Hopping Feature, it boasts a compact footprint measuring as small as 12.7mm x 27mm.
SOFTWARE SPECIFICATION
i. ExpressPCB
ii. Eclipse IDE
iii. Android Studio
5.EFFICIENCY OF THE SYSTEM
The proposed model operates with two distinct specifications: locomotion via accelerometer and touch screen mode. The common element in both applications is the use of an Android smartphone. An Android application is developed, and the resulting APK file is stored on the smartphone.
Concerning the touch screen mode, the vehicle’s movements are constrained to back-forth, right, and left, following the default direction notations embedded in the software. To maneuver the vehicle diagonally, it is necessary to move the vehicle backward, and the software will track the corresponding curve angle based on the desired degree of movement. In contrast, the accelerometer application simplifies this process by directly moving the vehicle to the diagonal angle corresponding to the provided input.
The accelerometer application involves storing a set of three-dimensional values in the software, facilitating easy and efficient movement of the vehicle in the desired direction with minimal effort. Compared to the touch screen mode, the accelerometer-based input system exhibits higher efficiency.

6. LITERATURE SURVEY
In this specific article, the wheelchair is operated through hand gestures, where MEMS sensors and the wheelchair constitute the main units. MEMS sensors play a key role in detecting gestures, converting them into a 6-digit binary value. This binary value is then transmitted to a PIC microcontroller, directing the movement of the wheelchair. Additional controllers are utilized to manage the wheelchair’s various movements [1].
The article explores wheelchair control through both voice commands and hand gestures. A speech recognition model, incorporating MEMS sensors and a wheelchair control unit, employs Hidden Markov models for voice recognition. MEMS sensors contribute voltage to the microcontroller based on the hand’s gestures. The article utilizes an ARM controller for implementing these control mechanisms [2].
While wheelchairs with joystick interfaces exist, not all individuals can utilize this feature. The article proposes low-level navigation to enhance driving assistance, integrating a wheelchair with a GUI (Graphic User Interface), sensors, and on-board computers. The wheelchair employs indoor navigation and a user interface tailored to individual abilities [3].
The article introduces an intelligent wheelchair with dual control modes: voice recognition and a touch screen. The touch screen displays different program values, allowing users to direct the wheelchair by touching the screen accordingly. Brushless DC motors at the rear end move the wheels, and PWM technique is employed for control [4].
The paper presents the development of a smart wheelchair that is more user-friendly than standard power wheelchairs. A Smart Wheelchair Component System (SWCS) is created with minimal modifications, and four different manufacturers are involved in evaluating the SWCS prototype [5].
Addressing the Wheelchair Slow Transit System (WST) and an elderly auxiliary travel model, this article discusses three fundamental composition frames in the system: support, transit components, and connection components. The system is adaptable to diverse conditions [6].
- How does the accelerometer function in this system?
The accelerometer measures acceleration along X, Y, and Z axes based on mobile phone motion, dictating wheelchair movement via Bluetooth connectivity. - What software is used to create the touch screen interface?
The touch screen software is created using the Eclipse IDE platform. - Can the wheelchair move diagonally in touchscreen mode?
No, movements are constrained to back-forth, right, and left; diagonal maneuvering requires moving backward first to track the curve angle. - Does the accelerometer or touchscreen offer higher efficiency?
The accelerometer-based input system exhibits higher efficiency compared to the touchscreen mode. - How far can the front IR sensor detect obstacles?
The front end sensor pair can accurately sense obstacles at a distance of approximately 15 cm when operating at 2.8 V. - What component converts TTL logic levels to RS232 levels?
The MAX232 IC is employed to convert TTL/CMOS logic levels to RS232 logic levels for serial communication. - Which motor driver IC is used for controlling the wheels?
The L293D integrated circuit serves as a dual H-bridge motor driver to manage the DC motors. - What action stops the wheelchair in touchscreen mode?
Pressing key 5 activates the brake switch to halt the wheelchair.