Summary of DC motor interfacing with AVR ATmega16/ATmega32
This article details interfacing a DC motor with an AVR ATmega16 microcontroller to control speed and direction. Speed is managed via PWM using a potentiometer connected to the ADC, while direction is switched using an external interrupt triggered by a toggle switch. The L293D driver IC facilitates bidirectional motor movement through an H-bridge configuration.
Parts used in the DC Motor Control Project:
- AVR ATmega16 microcontroller
- L293D motor driver IC
- DC motor
- 1kΩ Potentiometer
- Toggle switch
DC motor converts electrical energy in the form of Direct Current into mechanical energy.
In case of motor, the mechanical energy produced is in the form of rotational movement of the motor shaft.
The direction of rotation of the shaft of the motor can be reversed by reversing the direction of Direct Current through the motor.

The motor can be rotated at a certain speed by applying a fixed voltage to it. If the voltage varies, the speed of the motor varies.
Thus, the DC motor speed can be controlled by applying varying DC voltage; whereas the direction of rotation of motor can be changed by reversing the direction of current through it.
For applying varying voltage, we can make use of PWM technique.
For reversing the current, we can make use of H-Bridge circuit or motor driver ICs that employ the H-Bridge technique or other any other mechanisms.
For more information about DC motors and how to use them, H-Bridge circuit configuration, PWM technique, refer the topic DC Motors in the sensors and modules section.
For information about PWM in ATmega16 and how to use it, refer the topic PWM in AVR ATmega16/ATmega32 in the ATmega inside section.
Here we will be using ADC feature of AVR ATmega16.
For information about ADC in ATmega16 and how to use it, refer the topic ADC in ATmega16/ATmega32 in the ATmega inside section.
Here, we are going to interface DC motor with AVR ATmega16 microcontroller. In which we will control the DC motor speed by using POT connected to ADC of ATmega16 and direction by using a switch.
We are going to use L293D motor driver IC to control DC motor movement in both directions. It has in-built H-bridge motor drive.
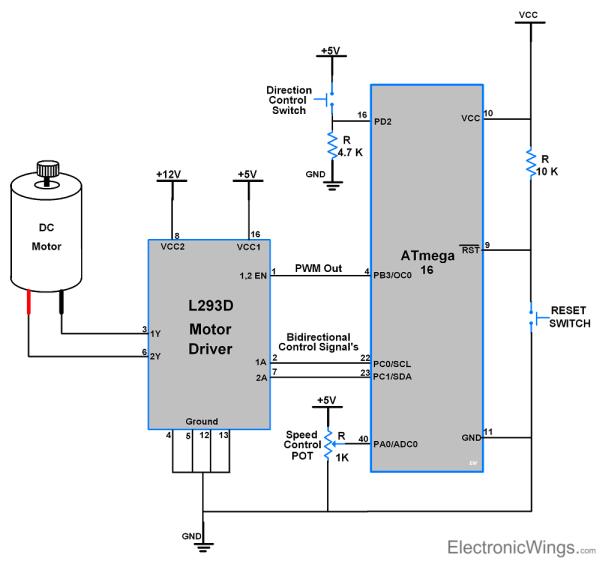
– As shown in above figure we have connected 1kΩ Potentiometer at ADC channel 0 of ATmega16 to change the speed of DC motor.
– One toggle switch is connected to INT0 pin (2nd pin of PORTD) which control the motor rotating direction.
– PORTC is used as an output control signal port.It provides control to motor1 input pins of the L293D motor driver which rotate motor clockwise and anticlockwise by changing their terminal polarity.
Programming steps
- Enable ADC and map its output into 0-255 range.
- Enable Global interrupt, INT0 external interrupt with the rising edge triggered mode.
- Set Fast PWM mode of Timer0 with FOSC/64 timer clock.
- ADC value is given to the OCR0 register and in an interrupt routine, we are toggling motor direction.
- Now continuously check for the interrupt for direction and read ADC value for speed control.
- A switch will produce interrupt which causes to change in motor direction. By varying potentiometer, variable ADC values can be given to OCR0 register to achieve speed variation.
Program
/*
* ATmega16 DC Motor control
* http://www.electronicwings.com
*/
#define F_CPU 8000000UL /* Define CPU Frequency 8MHz */
#include <avr/io.h> /* Include AVR std. library file */
#include <avr/interrupt.h>
#include <stdio.h> /* Include std. library file */
#include <util/delay.h> /* Include Delay header file */
volatile uint8_t Direction = 0;
void ADC_Init() /* ADC Initialization function */
{
DDRA = 0x00; /* Make ADC port as input */
ADCSRA = 0x87; /* Enable ADC, with freq/128 */
ADMUX = 0x40; /* Vref: Avcc, ADC channel: 0 */
}
int ADC_Read(char channel) /* ADC Read function */
{
ADMUX = 0x40 | (channel & 0x07);/* set input channel to read */
ADCSRA |= (1<<ADSC); /* Start ADC conversion */
while (!(ADCSRA & (1<<ADIF))); /* Wait until end of conversion */
ADCSRA |= (1<<ADIF); /* Clear interrupt flag */
_delay_ms(1); /* Wait a little bit */
return ADCW; /* Return ADC word */
}
ISR(INT0_vect)
{
Direction = ~Direction; /* Toggle Direction */
_delay_ms(50); /* Software de-bouncing control delay */
}
int main(void)
{
DDRC = 0xFF; /* Make PORTC as output Port */
DDRD &= ~(1<<PD2); /* Make INT0 pin as Input */
DDRB |= (1<<PB3); /* Make OC0 pin as Output */
GICR = (1<<INT0); /* Enable INT0*/
MCUCR = ((1<<ISC00)|(1<<ISC01));/* Trigger INT0 on Rising Edge triggered */
sei(); /* Enable Global Interrupt */
ADC_Init(); /* Initialize ADC */
TCNT0 = 0; /* Set timer0 count zero */
TCCR0 = (1<<WGM00)|(1<<WGM01)|(1<<COM01)|(1<<CS00)|(1<<CS01);/* Set Fast PWM with Fosc/64 Timer0 clock */
while(1)
{
if (Direction !=0) /* Rotate DC motor Clockwise */
PORTC = 1;
else /* Else rotate DC motor Anticlockwise */
PORTC = 2;
OCR0 = (ADC_Read(0)/4); /* Read ADC and map it into 0-255 to write in OCR0 register */
}
}
Read More: DC motor interfacing with AVR ATmega16/ATmega32
- How is the DC motor speed controlled?
The speed is controlled by varying the DC voltage using a PWM technique where the ADC value from a potentiometer is mapped to the OCR0 register. - Can the motor direction be reversed?
Yes, the direction is reversed by changing the terminal polarity of the motor input pins on the L293D driver via PORTC based on an interrupt signal. - What component is used to set the motor speed?
A 1kΩ Potentiometer connected to ADC channel 0 of the ATmega16 is used to vary the speed. - How is the motor direction changed?
A toggle switch connected to the INT0 pin triggers an external interrupt that toggles the Direction variable to reverse rotation. - Which timer mode is used for PWM generation?
Fast PWM mode of Timer0 with a clock source of FOSC/64 is configured for speed control. - Does the L293D IC support bidirectional control?
Yes, the L293D has an in-built H-bridge motor drive that allows the motor to rotate clockwise and anticlockwise. - What is the function of PORTC in this project?
PORTC is used as an output control signal port to provide control signals to the motor1 input pins of the L293D driver. - How is the ADC output processed?
The ADC output is read in the main loop, divided by four to map it into the 0-255 range, and assigned to the OCR0 register.