Summary of Obsatcle Avoidance Vehicle Using ATmega328P Microcontroller (Arduino)
This article details the construction of an Obstacle Avoidance Vehicle using an ATmega328 microcontroller. The robot detects objects via an ultrasonic sensor, scans its surroundings, and navigates through less obstructed paths using a custom algorithm. It features a chassis with two DC motors and an omnidirectional ball wheel, powered by a LiPo battery. A custom PCB simplifies wiring, while Embedded C code in Atmel Studio manages motor control and decision-making logic to avoid collisions or escape corners.
Parts used in the Obstacle Avoidance Vehicle:
- Arduino UNO based on ATmega328 microcontroller
- DYP-ME007 ultrasonic sensor
- Servomotor
- L298N Dual H-Bridge Motor driver
- LiPo 2s 4000 mAH Power Supply
- 2x DC motors with 298:1 metal gearbox
- LED
- Chasis
- 2 back wheels and one front omnidirectional ball wheel
- Atmel Studio software
- XLoader software
- Solder iron
- Desolder pump
- PCB's
- Jumper Wires
Obstacle Avoidance Vehicle capable of detecting objects, scanning the area and navigating through the less obstructed path.
Step 1: Materials Needed
Hardware
- Arduino UNO based on ATmega328 microcontroller
- DYP-ME007 ultrasonic sensor
- Servomotor
- L298N Dual H-Bridge Motor driver
- Power Supply – i used LiPo 2s 4000 mAH
- 2x DC motors with 298:1 metal gearbox
- LED
- Chasis
- 2 back wheels and one front omnidirectional ball wheel
Software
- Atmel Studio
- XLoader software
Tools
- Solder iron
- Desolder pump
- PCB’s
- Jumper Wires
Step 2: Hardware Implementation
The LED is used to visually illustrate the fact that the sensor detected an object.
The schematic of the chasis can be found here:
https://www.instructables.com/id/Line-following-robot-with-PID-algorithm/
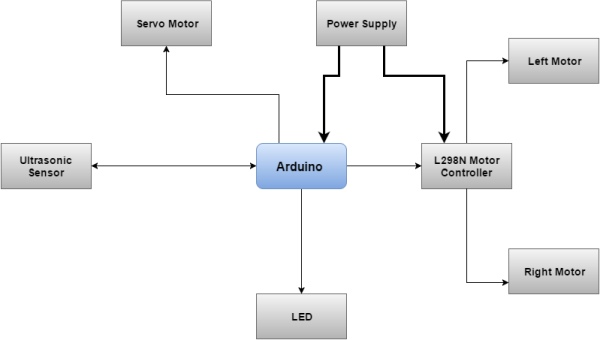
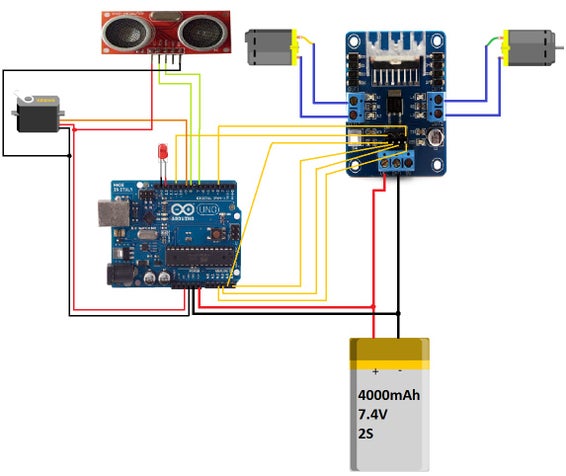
Diagram
All the electrical connection are presented in the diagram.
Custom Made PCB
For the purpose of eliminating the need of using six visible wires, an adaptation at the level of the motor controller board has been made. The pins used to control the direction of the motor, as well as the enabling (IN1, IN2, IN3, IN4, ENA, ENB) have been disordered and soldered back to the opposite part of the board, in order to fit the custom made PCB. The custom made PCB comes with four groups of female headers sockets with the purpose of extending the available pins of the Arduino. The fifth horizontal socket is used just as a support for the motor controller.
Step 3: Software Implementation
The programming language used for implementation is Embedded C which is considered to be a high level assembly language. Embedded C language have been chosen for having the possibility to write the code in Atmel Studio which allows ports manipulation, working with bits and timers, interrupts and embedded system concepts.
The resulted HEX file from the compilation was uploaded to the microcontroller bootloader using Xloader software.
Algorithm
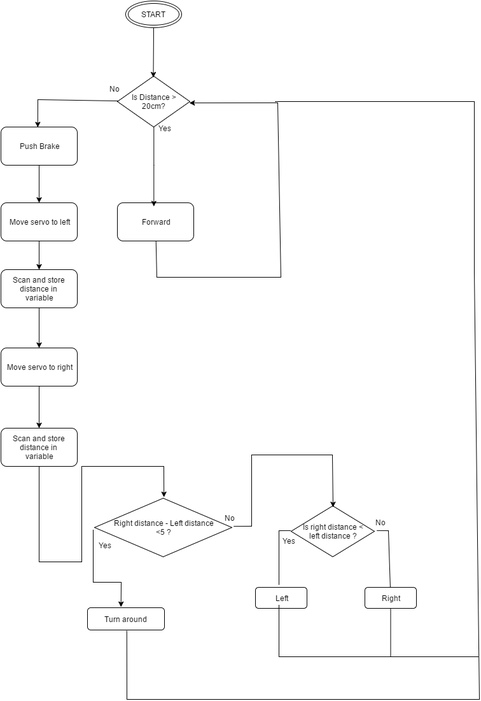
The algorithm is presnted in the figure.
1) Enable motors
2) Scan
3) Is distance to obstacle greater than 20 cm?
a) If yes = > move forward
b) If no:
b.i) Stop, scan left side and store left distance in a variable
b.ii) Scan right side and store right distance in another variable
b.iii) Are the two distances smaller than 5 cm? (By subtrating the two distances the robot is able to get out of a corner without being stuck)
(b.iii.1) If yes => turn around and move forward
(b.iii.2) If no:
(b.iii.2.a) Is right distance smaller than left distance?
(b.iii.2.a.i) If yes => turn left and move forward
(b.iii.2.a.ii) If no => turn right and move forward
Step 4: the Code
For a better understanding of the code is recommended to check the ATmega32P microncontroller datasheet.
The software implementation for the ultrasonic sensor was done with the help of the Arduino libraries.
Step 5: Demo
Source: Obsatcle Avoidance Vehicle Using ATmega328P Microcontroller (Arduino)
- What is the primary function of the LED in this project?
The LED is used to visually illustrate that the sensor has detected an object. - How does the robot decide which direction to turn when an obstacle is close?
The robot compares left and right distances; if the right distance is smaller it turns left, otherwise it turns right. - Can the robot get out of a corner if both sides are blocked?
Yes, if both distances are smaller than 5 cm the robot turns around and moves forward. - What programming language was used for the software implementation?
Embedded C was chosen to allow ports manipulation, working with bits and timers, interrupts and embedded system concepts. - Which software tool is used to upload the HEX file to the microcontroller?
Xloader software is used to upload the resulted HEX file from the compilation to the microcontroller bootloader. - Why was a custom made PCB created for this vehicle?
The custom PCB eliminates the need for six visible wires by reordering pins on the motor controller board. - What happens if the distance to an obstacle is greater than 20 cm?
If the distance is greater than 20 cm the robot moves forward. - What type of power supply is used for the vehicle?
A LiPo 2s 4000 mAH battery is used as the power supply.