Summary of Password based door locking system
This project implements a low-cost password-based door lock using an AVR Atmega8 microcontroller. Passwords can be entered via a 4x3 matrix keypad or an IR RC-604 remote. The system drives two relays (one for a buzzer and one for a motor/door), displays prompts on a 16x2 LCD, and stores/retrieves the password in EEPROM. The article provides circuit diagrams, PCB layouts, Proteus simulation files, and full AVR C source code for programming and testing.
Parts used in the Password based door locking system:
- Atmega8 Microcontroller
- Relays
- Switches
- 4x3 Keypad Matrix
- LM7805 Voltage Regulator
- BC548 Transistor
- 16x2 LCD Display
- IR Remote (RC-604)
- Required passive components and PCB
Password based door locking system, uses Matrix keypad to enter the password, This project is extended to operate on IR Remote RC-604, In this project all required data is given Circuit diagram, C code, PCB design and All related data, This project is based on AVR Atmega8 Microcontroller.
Features:
1. You can enter password through Keypad or IR Remote
2. Low Cost
3. Simple to design
4. Operates Two relays One for Buzzer and Another for Operating Motor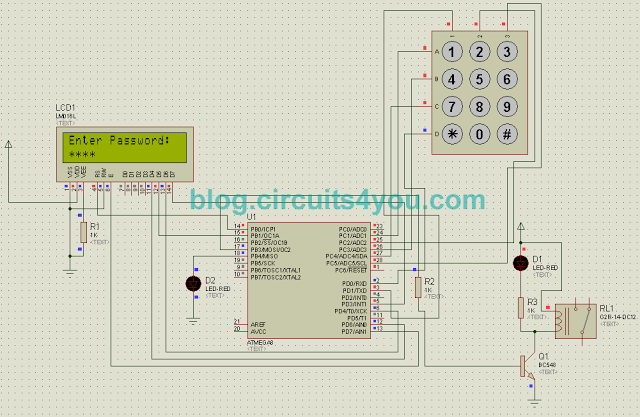
Step 1: Major Components Required
1. Atmega 8 Microcontroller
2. Relays, Switches
2. Relays, Switches
3. 4×3 Keypad Matrix
4. LM7805
5. BC548
6. 16×2 LCD Display
4. LM7805
5. BC548
6. 16×2 LCD Display
7. Buy Components from our Store www.circuits4you.com
Step 2: Circuit Design and PCB Manufacturing
Download Requires Files
1. Download Proteus Simulation Circuit Diagram (you can try proteus simulation of this project)
Download Requires Files
1. Download Proteus Simulation Circuit Diagram (you can try proteus simulation of this project)
2. Download pdf PCB Layout
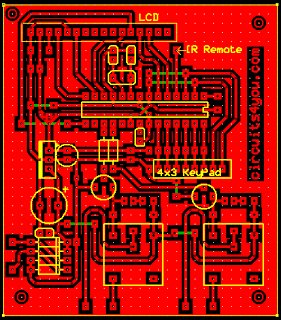
3. Assemble components using above files.
AVR Studio C Code
#include <avr/io.h>
#include <string.h>
#include <avr/eeprom.h>
#include <avr/interrupt.h>
#include "remote.h"
unsigned char u8_data;
//LCD connections
#define E PD7
#define RS PB0
#define Relay PB3 //Relay1
#define Relay1 PB4 //Relay1
//Decleration
void display(char string[16]);
void displaybyte(char D);
void dispinit(void);
void cleardisplay(void);
void line1(void);
void line2(void);
void epulse(void);
void delay_ms(unsigned int de);
void PasswordNotOK();
void PasswordNotOK1();
char KeyCheck();
char mystr[6];
char Password[3];
int main(void)
{
DDRB = 0b00011011; //LCD port direction
DDRD = 0b11011001; //LCD port direction
DDRC = 0b00011010; //Key Pad
PORTC= 0b11111111; //Activate internal pullups for keypad
PORTD |=(1<<PD1);
// PORTB |=(1<<Relay);
delay_ms(500); //Initiaize LCD
dispinit();
delay_ms(200);
line1();
uint8_t cmd=0;
RemoteInit();
display(" Password ");
line2();
display(" Access ");
cleardisplay();
line1();
char Key,cnt;
cnt=0;
Key=KeyCheck();
if(Key==11)
{
//Get Old Password
line1();
display("Enter Old Pass: ");
line2();
cnt=0;
while(1)
{
Key = KeyCheck();
//cmd=GetRemoteCmd(0);
//displaybyte(cmd+48);
delay_ms(100);
if((Key != 15) && (cnt<4) && (Key !=11) && (Key !=12))
{
//line1();
//displaybyte(Key+48); //Display Passsword
displaybyte(0x2A); //"*" Display '*' Instead of password
Password[cnt]=Key;
cnt++;
}
if(Key==11) //Cancel Key
{
cnt=0;
PasswordNotOK1();
}
if(((Key !=15)) && (cnt==4))
{
if(Key==12) //OK Key
{
//Verify password
if(eeprom_read_byte((uint8_t*)4)==Password[0])
{
if(eeprom_read_byte((uint8_t*)5)==Password[1])
{
if(eeprom_read_byte((uint8_t*)6)==Password[2])
{
if(eeprom_read_byte((uint8_t*)7)==Password[3])
{
//PasswordOK
cleardisplay();
line1();
display(" Enter New ");
line2();
display("Password:");
while(1)
{
Key = KeyCheck();
delay_ms(100);
if((Key != 15) && (cnt<4))
{
//line1();
displaybyte(Key+48);
Password[cnt]=Key;
cnt++;
}
if((Key !=15) && (cnt==4))
{
if(Key==12) //OK Key
{
cleardisplay();
line1();
display("Password Changed");
eeprom_write_byte((uint8_t*)4,Password[0]);
eeprom_write_byte((uint8_t*)5,Password[1]);
eeprom_write_byte((uint8_t*)6,Password[2]);
eeprom_write_byte((uint8_t*)7,Password[3]);
delay_ms(2000);
cleardisplay();
break;
}
if(Key==11) //Cancel Key
{
cleardisplay();
break;
}
}
}
//}
//=========
cleardisplay();
line1();
display("Enter Password:");
line2();
cnt=0;
}
else
{
cnt=0;
//PORTB |= (1<<Relay1);
PasswordNotOK1();
}
}
else
{
cnt=0;
//PORTB |= (1<<Relay1);
PasswordNotOK1();
}
}
else
{
cnt=0;
//PORTB |= (1<<Relay1);
PasswordNotOK1();
}
}
else
{
cnt=0;
//PORTB |= (1<<Relay1);
PasswordNotOK1();
}
}
if(Key==11) //Cancel Key
{
cleardisplay();
line1();
display("Enter Old Pass: ");
line2();
cnt=0;
}
}
}
}
//----------------
line1();
display("Enter Password:");
line2();
cnt=0;
while(1)
{
Key = KeyCheck();
cmd=GetRemoteCmd(0);
//displaybyte(cmd+48);
delay_ms(100);
if((cnt<4) && (cmd !=10) && (cmd !=25) && (cmd !=255))
{
//line1();
//displaybyte(cmd+48);
displaybyte(0x2A); //"*"
Password[cnt]=cmd;
cnt++;
}
if((Key != 15) && (cnt<4) && (Key !=11) && (Key !=12))
{
//line1();
//displaybyte(Key+48);
displaybyte(0x2A); //"*"
Password[cnt]=Key;
cnt++;
}
if(Key==11 || cmd==10) //Cancel Key
{
cnt=0;
PasswordNotOK();
}
if(((Key !=15) || (cmd==25)) && (cnt==4))
{
if(Key==12 || cmd==25) //OK Key
{
//Verify password
if(eeprom_read_byte((uint8_t*)4)==Password[0])
{
if(eeprom_read_byte((uint8_t*)5)==Password[1])
{
if(eeprom_read_byte((uint8_t*)6)==Password[2])
{
if(eeprom_read_byte((uint8_t*)7)==Password[3])
{
//PasswordOK
cleardisplay();
PORTB |=(1<<Relay);
line1();
display("Open The Door");
delay_ms(4000);
cleardisplay();
//Operate Relay
PORTB &=~(1<<Relay);
line1();
display("Enter Password:");
line2();
cnt=0;
}
else
{
cnt=0;
PORTB |= (1<<Relay1);
PasswordNotOK();
}
}
else
{
cnt=0;
PORTB |= (1<<Relay1);
PasswordNotOK();
}
}
else
{
cnt=0;
PORTB |= (1<<Relay1);
PasswordNotOK();
}
}
else
{
cnt=0;
PORTB |= (1<<Relay1);
PasswordNotOK();
}
}
if(Key==11) //Cancel Key
{
cleardisplay();
line1();
display("Enter Password:");
line2();
cnt=0;
}
}
}
}
void PasswordNotOK()
{
cleardisplay();
line1();
display(" Incorrect ");
line2();
display(" Password ");
delay_ms(2000);
cleardisplay();
line1();
display("Enter Password:");
line2();
PORTB &=~ (1<<Relay1);
}
void PasswordNotOK1()
{
cleardisplay();
line1();
display(" Incorrect ");
line2();
display(" Password ");
delay_ms(2000);
cleardisplay();
line1();
display("Enter Old Pass: ");
line2();
}
char KeyCheck()
{
char KeyCode;
KeyCode=15;
//Scan 1
PORTC &=~(1<<PC1);
PORTC |=(1<<PC3);
PORTC |=(1<<PC4);
PORTD |=(1<<PD0);
if((PIND & 0x02)==0x00)
{
KeyCode=3;
while((PIND & 0x02)==0x00);
}
if((PINC & 0x04)==0x00)
{
KeyCode=2;
while((PINC & 0x04)==0x00);
}
if((PINC & 0x20)==0x00)
{
KeyCode=1;
while((PINC & 0x20)==0x00);
}
//Scan 2
PORTC |=(1<<PC1);
PORTC &=~(1<<PC3);
PORTC |=(1<<PC4);
PORTD |=(1<<PD0);
if((PIND & 0x02)==0x00)
{
KeyCode=6;
while((PIND & 0x02)==0x00);
}
if((PINC & 0x04)==0x00)
{
KeyCode=5;
while((PINC & 0x04)==0x00);
}
if((PINC & 0x20)==0x00)
{
KeyCode=4;
while((PINC & 0x20)==0x00);
}
//Scan 3
PORTC |=(1<<PC1);
PORTC |=(1<<PC3);
PORTC &=~(1<<PC4);
PORTD |=(1<<PD0);
if((PIND & 0x02)==0x00)
{
KeyCode=9;
while((PIND & 0x02)==0x00);
}
if((PINC & 0x04)==0x00)
{
KeyCode=8;
while((PINC & 0x04)==0x00);
}
if((PINC & 0x20)==0x00)
{
KeyCode=7;
while((PINC & 0x20)==0x00);
}
//Scan 4
PORTC |=(1<<PC1);
PORTC |=(1<<PC3);
PORTC |=(1<<PC4);
PORTD &=~(1<<PD0);
if((PIND & 0x02)==0x00)
{
KeyCode=12;
while((PIND & 0x02)==0x00);
}
if((PINC & 0x04)==0x00)
{
KeyCode=0;
while((PINC & 0x04)==0x00);
}
if((PINC & 0x20)==0x00)
{
KeyCode=11;
while((PINC & 0x20)==0x00);
}
return KeyCode;
}
void display(char string[16])
{
int len,count;
len = strlen(string);
for (count=0;count<len;count++)
{
displaybyte(string[count]);
}
}
void displaybyte(char D)
{
char D1;
D1=D;
D1=D1 & 0xF0;
D1=D1 >> 4; //Send MSB
PORTD = PORTD & (0b10100011);
PORTB = PORTB & (0b11111101);
PORTD |= ((D1 & 0x01) << 6);
//PORTD |= ((D1 & 0x02) << 1);
PORTB |= ((D1 & 0x02));
PORTD |= ((D1 & 0x04) << 2);
PORTD |= (D1 & 0x08);
epulse();
D1=D;
D1=D1 & 0x0F; //Send LSB
PORTD = PORTD & (0b10100011);
PORTB = PORTB & (0b11111101);
PORTD |= ((D1 & 0x01) << 6);
//PORTD |= ((D1 & 0x02) << 1);
PORTB |= ((D1 & 0x02));
PORTD |= ((D1 & 0x04) << 2);
PORTD |= (D1 & 0x08);
epulse();
}
void dispinit(void)
{
int count;
char init[]={0x43,0x03,0x03,0x02,0x28,0x01,0x0C,0x06,0x02,0x02};
PORTB &= ~(1<<RS); // RS=0
for (count = 0; count <= 9; count++)
{
displaybyte(init[count]);
}
PORTB |= 1<<RS; //RS=1
}
void cleardisplay(void)
{
PORTB &= ~(1<<RS); // RS=0
displaybyte(0x01);
PORTB |= 1<<RS; //RS=1
}
void line1(void)
{
PORTB &= ~(1<<RS); // RS=0
displaybyte(0x80);
PORTB |= 1<<RS; //RS=1
}
void line2(void)
{
PORTB &= ~(1<<RS); // RS=0
displaybyte(0xC0);
PORTB |= 1<<RS; //RS=1
}
void epulse(void)
{
PORTD |= 1<<E;
delay_ms(1);
PORTD &= ~(1<<E);
delay_ms(1);
}
void delay_ms(unsigned int de)
{
unsigned int rr,rr1;
for (rr=0;rr<de;rr++)
{
for(rr1=0;rr1<700;rr1++) //395
{
asm("nop");
}
}
}
Step 5: Test the code and Hardware
1. Follow us on Google+
2. You Did it Yourself
3. Refer Tutorials from this site for more understanding of code and Circuits
4. Please comment if you have any trouble, Its Tested code
For more Detail: Password based door locking system
- Can the password be entered using an IR remote?
Yes, the project is extended to operate with an IR Remote RC-604 as well as the keypad. - What microcontroller is this project based on?
The project is based on the AVR Atmega8 microcontroller. - Does the system use relays and what are they for?
Yes, it operates two relays: one for the buzzer and another for operating the motor (door). - Is the LCD used in the project specified?
Yes, a 16x2 LCD display is used to show prompts and messages. - Are circuit diagrams and PCB files provided?
Yes, the article provides circuit diagram, Proteus simulation file, and PDF PCB layout for download. - Is the AVR C source code available?
Yes, complete AVR Studio C code is provided in the article and downloadable as a project zip. - Where is the password stored?
The password is stored in EEPROM and read/written using AVR eeprom functions shown in the code. - Does the project include instructions for programming the controller?
Yes, the article includes a step for programming the controller and provides the necessary code files. - Is this project suitable for simulation?
Yes, a Proteus simulation circuit diagram is provided so you can try simulation of the project. - Is the design intended to be low cost and simple?
Yes, the features list states the project is low cost and simple to design.