Summary of Accelerometer based Hand Gesture Controlled Wheel Chair with ATmega32 for Physically Handicapped
This project designs a wheelchair controlled by hand gestures using an ADX335 accelerometer and an AVR ATmega32 microcontroller. The system detects hand tilts to determine movement direction, converting analog sensor signals via the microcontroller's ADC. It then drives DC motors through an L293D driver and displays the current direction on a 16x2 LCD, enabling forward, backward, left, right, or stop actions for physically handicapped users.
Parts used in Accelerometer based Hand Gesture Controlled Wheel Chair:
- AVR ATmega32 Microcontroller
- ADX335 Accelerometer Sensor
- L293D DC Motor Driver
- 16X2 Alphanumeric LCD
- DC Motors
- Hand Glove or Mounting Material
In this project, we will learn How to design an Accelerometer based Hand Gesture Controlled Wheel Chair with AVR ATmega32 Microcontroller for Physically Handicapped. Here, we will use our hand gestures as input signals to drive the wheel chair in different direction and we will display the direction of movement of the wheel chair in a 16X2 alphanumeric LCD.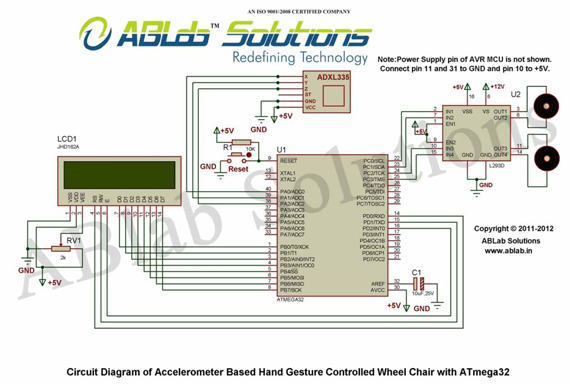
In our case, hand gestures mean tilt of hand in different direction. To detect different hand gestures, we will use the ADX335 accelerometer sensor. The sensor will be attached to our hand with some material or through a hand glove. The three output signals of accelerometer sensor are analog in nature and it cannot be processed directly by ATmega32 microcontroller. For this, we will use the ADC of the ATmega32 microcontroller to convert the analog signals to digital values. After converting the analog signals of accelerometer sensor to digital values, the ATmega32 microcontroller will process the digital values to find different gestures of the hand. Once the hand gesture is known, the ATmega32 microcontroller will send the required signal to the DC motor driver (L293D) of the wheel chair to drive the wheel chair in the desired direction. Also, the microcontroller will display the direction of movement of the wheel chair in a 16X2 alphanumeric LCD.
The control hand gestures for the wheel chair are forward tilt, backward tilt, left tilt, right tilt and no tilt to drive the wheel chair in forward, backward, left, right direction and to stop it respectively. Now, tilt your hand in different direction and drive your wheel chair as you want.
For more detail: Accelerometer based Hand Gesture Controlled Wheel Chair with ATmega32 for Physically Handicapped
-
How are hand gestures detected in this project?
Hand gestures are detected as tilts of the hand using an ADX335 accelerometer sensor attached to the hand. -
What type of signals does the accelerometer sensor output?
The three output signals from the accelerometer sensor are analog in nature. -
How are analog signals processed by the microcontroller?
The ADC of the ATmega32 microcontroller converts the analog signals to digital values for processing. -
Which component drives the wheel chair motors?
The L293D DC motor driver receives signals from the microcontroller to drive the wheel chair. -
How is the direction of movement displayed?
A 16X2 alphanumeric LCD displays the direction of movement of the wheel chair. -
What gesture stops the wheel chair?
No tilt of the hand is used to stop the wheel chair.