Summary of LINE FOLLOWING ROBOT PROJECT ULTRASONIC SENSOR CIRCUIT ATMEGA16 CNY70 SFR05
This article describes a school competition line-following robot designed with an ATMega16 microcontroller running at 16MHz. The project utilizes CNY70 sensors for line detection and features an SFR05 ultrasonic sensor for obstacle avoidance. Powered by four 1100 mAh NiMH batteries, the robot was developed using GCC WinAVR and AVR Studio 4 software, with hex code available for download.
Parts used in the Line Following Robot:
- ATMega16 microcontroller (16MHz)
- GCC WinAVR software
- AVR Studio 4 software
- Four 1100 mAh NiMH batteries
- CNY70 sensors
- SFR05 Ultrasonic Sensor
- Custom PCB design
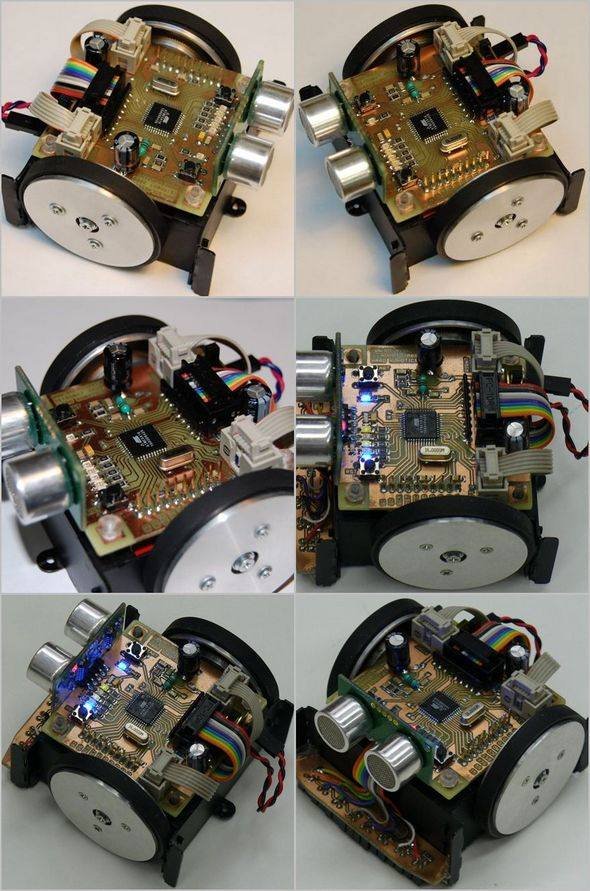
Quite a different line following robot project was already in school competition designed for the author as he could a nice job exposes the robot’s appearance sumo robots similar to healthy controls ATMega16 microcontroller… Electronics Projects, Line Following Robot Project Ultrasonic Sensor Circuit Atmega16 CNY70 SFR05 “avr project, microcontroller projects, “

Quite a different line following robot project was already in school competition designed for the author as he could a nice job exposes the robot’s appearance sumo robots similar to healthy controls ATMega16microcontroller (16MHz is used) provided by software GCC WinAVR and AVR Studio 4 was written.
If the robot’s power supply line provided with 4 1100 mAh NiMH batteries in the follow-up standards have Senri CNY70 tamer, but I’m not sure if SFR05 Ultrasonic Sensor can be used to detect obstacles. The robot’s mechanical and PCB design was very stylish resources and resource c eagle, given hex code through.

Source: solarskit.wz.cz/century.html alternative line-following-robot-project-ultrasonic-sensor-circuit-atmega16-cny70-sfr05.rar
-
What microcontroller is used in this robot?
The robot uses an ATMega16 microcontroller operating at 16MHz. -
How is the robot powered?
The power supply consists of four 1100 mAh NiMH batteries. -
Which sensors detect the line and obstacles?
CNY70 sensors are used for line following and an SFR05 Ultrasonic Sensor detects obstacles. -
What software was used to write the code?
The software written includes GCC WinAVR and AVR Studio 4. -
Can the SFR05 sensor be used for obstacle detection?
The text suggests the SFR05 Ultrasonic Sensor can be used to detect obstacles. -
Where can the hex code for the robot be found?
The hex code is provided through resources mentioned in the source link.