AVR ATmega16 Controlled Stepper Motor using Proteus Simulation
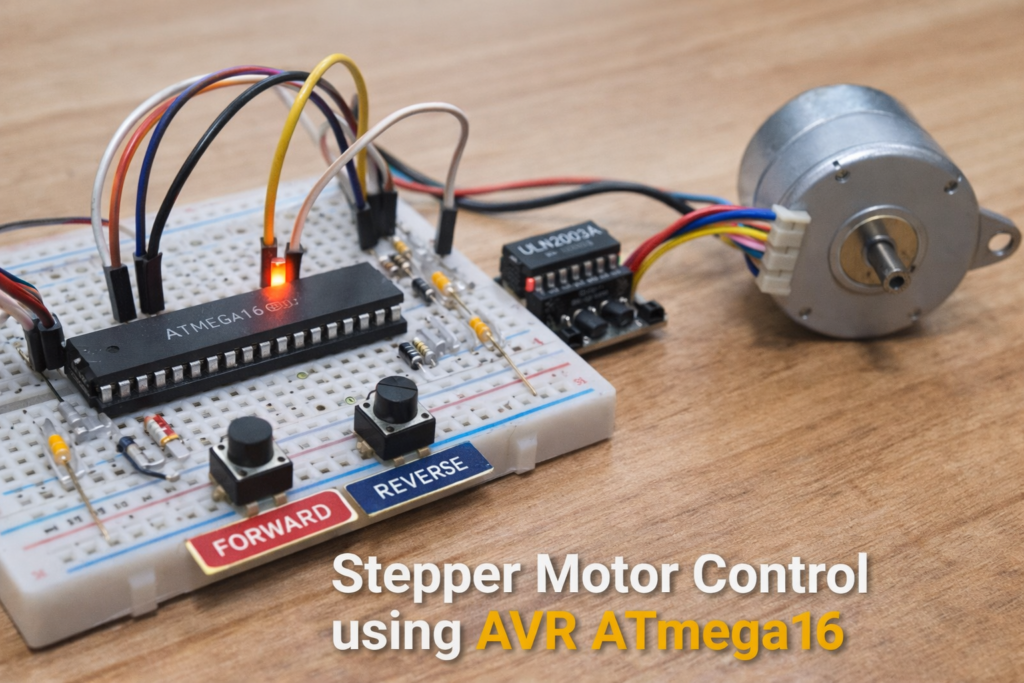
Introduction Stepper motors are widely used in embedded systems and automation projects where precise position control is required. This ATmega16 stepper motor control project demonstrates how an AVR ATmega16 controls a stepper motor using simple forward and reverse commands. The project is simulated using Proteus simulation software, allowing users to test the circuit and firmware […]
AVR ATmega16 Controlled Stepper Motor using Proteus Simulation Read More »