Summary of Mobile – Gesture Controlled Car
This article describes a gesture-controlled toy car using an Android phone's accelerometer. The system features a wireless Bluetooth communication link between the mobile app and an AtMega 16 microcontroller on the car. The microcontroller processes orientation data to drive motors via an L293D driver, powered by an 11.1V Li-Po battery with a 7805 regulator for logic circuits.
Parts used in the Gesture-Controlled Car:
- AtMega 16 microcontroller
- L293D motor driver IC
- Bluetooth module (HC05)
- Chassis
- Motors & Wheels
- Mobile phone (Android + Bluetooth compatibility)
- Battery (11.1 V LI-PO)
- 7805 voltage regulator
REQUIREMENT:
- AtMega 16 microcontroller
- L293D motor driver IC
- Bluetooth module (HC05)
- Chassis
- Motors & Wheels
- Mobile phone (Android + Bluetooth compatibility)
- Battery (for car section)
DESCRIPTION:
Have you ever wondered of operating a toy car with you own mobile phone? Yes I have made such a thing. This project involves the communication between your mobile phone and the car. Here I have used the internal accelerometers of the mobile phone to operate my toy car.
The system communicates wirelessly over Bluetooth interface, thus we require a phone with Bluetooth compatibility. Moreover I have made an Android Application for the same task therefore the phone must have ANDROID operating system J
Now this project deals with two sections:
· CAR section
· Mobile phone (ANDROID APP)
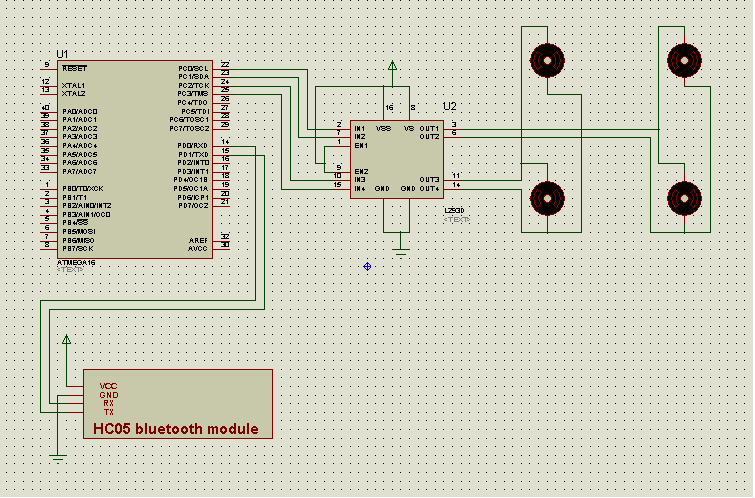
Let’s first talk about the Car section, It comprises of AtMega 16 microcontroller, L293D motor driver IC and most importantly the Bluetooth module which makes this whole task work wirelessly. I have used an 11.1 V LI-PO battery (Lithium Polymer) to assure long working duration.
The same 11.1 volts is given to the motors for working properly while a 7805 voltage regulator regulates this voltage to 5V so that the remaining circuit functions properly without any risk of being damaged.
The next important part of this section is the Bluetooth module: HC05. These modules follow the Bluetooth protocol to get the job done wirelessly. Bluetooth are nothing but ultra high frequency radio waves. They cover a larger area and work quite well as compared to those RF 343 Hz modules.
Moreover these Bluetooth modules provide a chance to interact with other Bluetooth compatible devices like mobile phone etc.
The communication is being done with UART interface at 9600 baud rate.
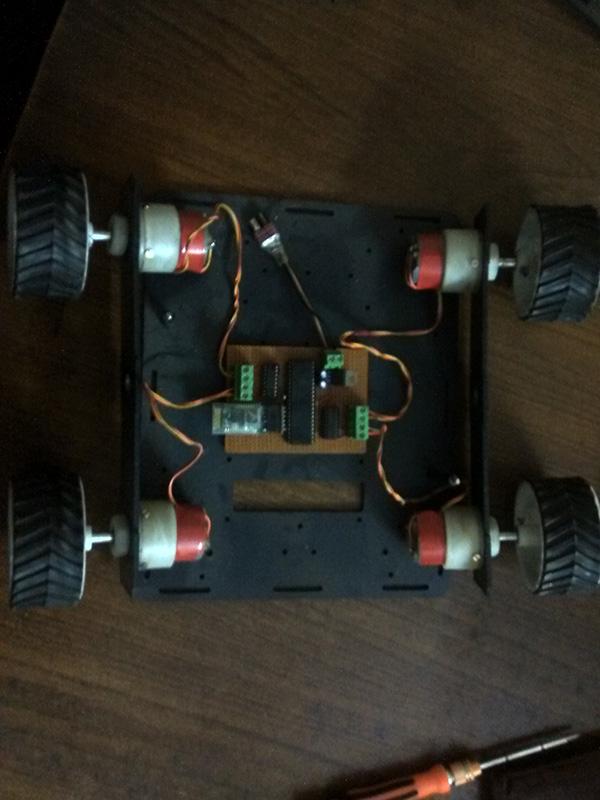
The assembling of the car section is shown below:
Now talking about the mobile part, now a day’s every mobile has an accelerometer sensor; I have used this sensor to give me the orientation vales for further processing. I have made an ANDROID APP which extracts this data and send it over to the Bluetooth module present in the CAR section. This data is then processed in my AtMega 16 IC to tell L293D IC what to do to the motors connected to it. Like if I get “W”, this tells the microcontroller to move the car forward similarly “S”, “A”, ”D” and “ ” make the car move in backward, left, right and stop positions.
The most interesting thing about this section is that we first need to calibrate the phone’s accelerometer data into our microcontroller IC so that perfect results are obtained each time this car is turned on.
I have made this ANDROID APP using freeware software known as APP INVENTOR 2. This has been developed by the students of MIT for those who find it difficult to learn android programming. They make use of simple block arrangements to perform any android based task. I find it very useful for myself and for those who don’t know how to make android apps!!! Thanks a lot to MIT.
For more detail: Mobile – Gesture Controlled Car
- How does the car operate?
The car operates wirelessly using the internal accelerometers of an Android mobile phone to send orientation values. - What operating system is required for the phone?
The phone must have an ANDROID operating system to run the custom application. - Which software was used to create the Android app?
The app was developed using APP INVENTOR 2, a freeware tool created by MIT students. - How is the voltage regulated for the circuit?
A 7805 voltage regulator converts the 11.1 volts from the battery down to 5V for the remaining circuit. - What baud rate is used for communication?
Communication between the phone and the car is done via UART interface at 9600 baud rate. - What commands control the car's movement?
Letters W, S, A, D, and space tell the microcontroller to move forward, backward, left, right, and stop respectively. - Why is calibration necessary?
Calibration is needed to align the phone's accelerometer data with the microcontroller for perfect results each time. - What type of battery powers the car section?
An 11.1 V LI-PO (Lithium Polymer) battery is used to assure long working duration.