Summary of Servo motor control using AVR
Servo motors are closed-loop feedback systems used in robotics and RC vehicles to precisely control position. They operate via a motor, gears, and a control circuit that compares a potentiometer's reading against a desired angle sent through Pulse Width Modulation (PWM) signals. The system adjusts motor speed based on the error difference, ensuring accurate positioning within a limited rotation range or modified for continuous rotation.
Parts used in the Servo Motor System:
- Motor
- Gears
- Motor driving and control circuit
- Potentiometer
- Digital controller
- Power source (DC voltage 4.8 to 7.2V)
- Three wires (Power, Ground, Control)
Servo motors are so called “closed feedback” systems. This means that motor comes with control circuit, which senses if motor mechanism is in desired location and if not it continuously corrects an error until motor reaches proper point.
Servo motors are widely used in robotics, remote controlled planes, vehicles. So they come in many shapes and sizes, but they operate in almost the same way. Usually Servo motors are controlled by computer, microcontroller or even simple timer circuit. Of course you may find more advanced servos – R/C so called radio controlled. But again, they are same servos just it takes signals from receiver.
How Servo Motor Control Works
Usually servo motors are put in plastic box, but inside there is a whole system: motor itself, gears and motor driving and control circuit.

the gears reduces motor speed but increases torque. As we mentioned that servos works with closed feedback loop. This is actually potentiometer which is connected to mechanical shaft and senses the angle of turn. So potentiometer voltage directly indicate the angle of turn. Potentiometer signal goes to digital controller of motor which powers motor until potentiometer reaches desired angle, then logic shuts the motor.
Servos usually are powered by DC voltage from 4.8 to 7.2V.
Usually servos are designed with limited rotation angle like 90° or 180° and so on. Of course they can be modifier for continuous rotation. Precise rotation and force thanks to gear system servos are ideal for robotic purposes.
Servo control signals
Servo motor shaft is positioned with pulse width modulated signals. So all servos comes with three wires (Power, Ground and Control). So pulses are sent via control wire. Usually in hobby servos with rotation angle 90° signal width vary between 1 and 2ms. If pulse is more wide rotation continues until reaches mechanical limits.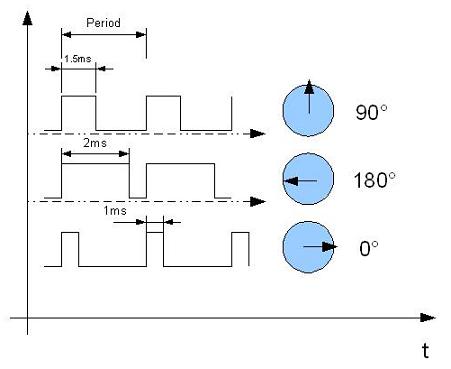
The frequency of PWM usually is in range from 30 to 60Hz – this is so called refresh rate. If this refresh rate is too small then then accuracy of servo reduces as it starts lose its position periodically if rate is too big, then servo can start chatter. It is important to select optimal rate, that servo motor could lock its position.
The motor powering circuit power motor depending on what is difference between current position and where it should be. If this difference is small the energy portion given to motos is small that it wouldn’t overshoot the position – motor in this situation is driven slowly. But is difference is big, then motor is powered to turn at full speed that it could reach new position as fast as possible. When shaft approaches to new position, at he end of movement motor slows down in order to stop at accurate position. This complicated process lasts for about a half a second when rotation angle is 60°.
For more detail: Servo motor control using AVR
- How do servo motors correct their position?
Servos use a closed feedback loop where a control circuit senses the current location and continuously corrects errors until the motor reaches the desired point. - What role do gears play in a servo motor?
The gears reduce motor speed while increasing torque, making servos ideal for robotic purposes requiring precise force. - How does the potentiometer function in a servo?
The potentiometer is connected to the mechanical shaft to sense the angle of turn, with its voltage directly indicating the specific angle. - What voltage range powers standard servos?
Servos are usually powered by DC voltage ranging from 4.8 to 7.2V. - How is the servo shaft positioned?
The shaft is positioned using pulse width modulated signals sent via the control wire. - What is the typical signal width for hobby servos?
In hobby servos with a 90° rotation angle, the signal width typically varies between 1 and 2ms. - What happens if the PWM refresh rate is too small?
If the refresh rate is too small, the accuracy reduces because the servo starts to lose its position periodically. - How does the motor adjust its speed during movement?
The motor drives slowly if the position difference is small to avoid overshooting, but runs at full speed if the difference is large to reach the new position quickly.