Summary of Servo Motor Interfacing With 8051 Using Keil Compiler
This article explains how to interface and control a servo motor using an 8051 microcontroller via PWM signals. It details the internal construction of servo motors, including DC motors and potentiometers, and describes the closed-loop feedback system. The text outlines the three-wire connection setup (V+, Ground, Control) and specifies that pulse widths between 1ms and 2ms determine rotation angles from 0 to 180 degrees.
Parts used in Servo Motor Interfacing with 8051 Microcontroller:
- Servo motor
- 8051 microcontroller
- DC motor
- Potentiometer (variable resistor)
- Gear assembly
- Control circuit
- Keil compiler
Servo motor interfacing WITH 8051 MICROCONTROLLER: This article is about interfacing of servo motor with 8051 microcontroller. You will learn how to interface and control this motor using 8051 microcontroller. Servo motors are used in robotics, embedded systems and industries because they are very precise and reliable. They are used to operate remote control toy cars, airplanes or robots. Their motion can be controlled by rotating them in particular angle. Servo motor can be controlled by PWM signal. In this article we will interface servo motor with 8051 microcontroller and control its speed. I will recommend you to read a article on how to used keil compiler and how to use I/O ports of 8051 microcontroller before learning about interfacing servo motor with 8051.
CONSTRUCTION of servo motor
A DC servo motor consists of:
- DC motor
- Potentiometer (variable resistor)
- Gear assembly
- Control circuit
It consists of a closed loop system. Positive feedback is given to control the motion and position of the shaft. Feedback signal is generated by comparing output signal and reference input signal. Now, this feedback signal will act as input signal to control device. This signal will remain present as long as there remains a difference between reference input signal and output signal. So we have to maintain output of this system at desired value in presence of noises.
PRINCIPLE of interfacing servo motor
Servo motor is controlled by PWM (Pulse with Modulation) technique in which we control the angle of rotation through the duration of pulse applied to its Control pin.
It has three connection wires for:
- Positive supply V+
- Negative supply or Ground V-
- Control signal
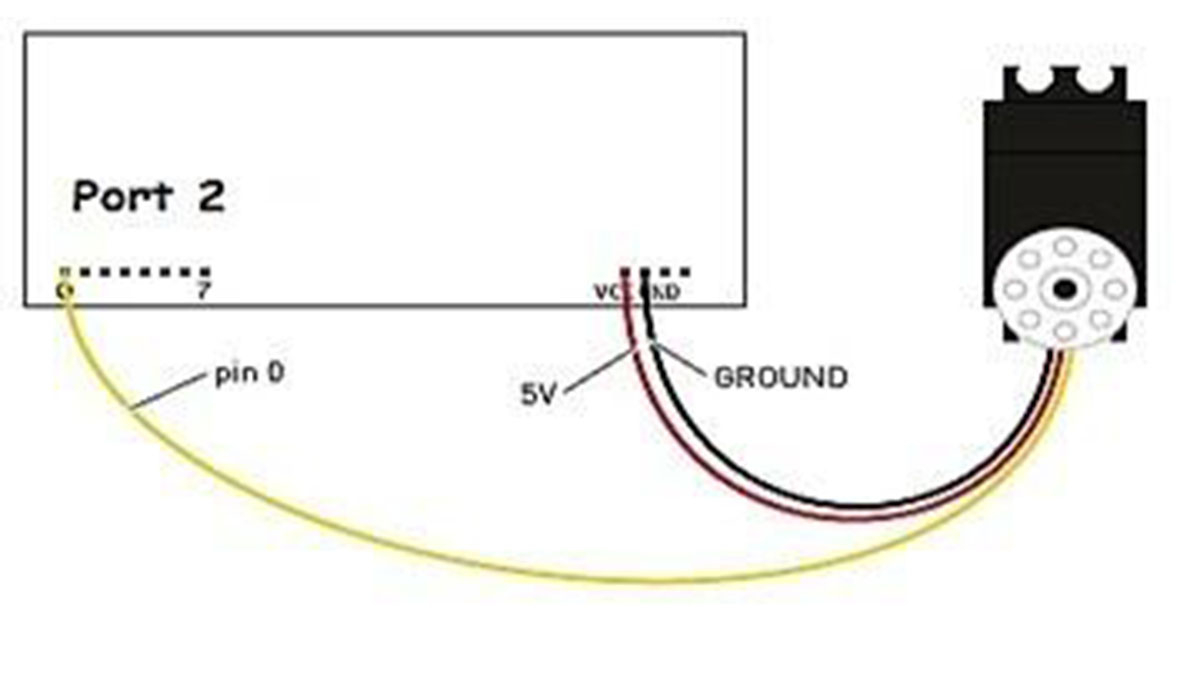
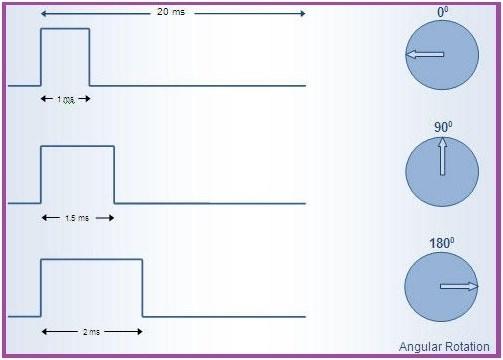
First two wires are used for giving power to motor. The control signal is connected with microcontroller to feed PWM signals. Gear and potentiometer control the DC motor in it. Servo motor can turn to 90, 180 degree in either direction and can go up to 360 degrees. Turning angle depends on manufacturing. The servo motor expects a pulse after every 20ms. Length of pulse determines how far the motor turns. The shaft angle exceeds with increase of pulse width. The duration of that logic 1 pulse can be from 1ms to 2ms.
- 1ms duration pulse can rotate servo motor to 0 degree
- 5ms duration pulse can rotate it to 90 degree
- 2ms duration pulse can rotate it to 180 degree
So we can say that pulse duration between 1ms to 2ms can rotate Servo motor to any angle that is between 0 and 180 degree.
Read more: servo motor interfacing with 8051 using keil compiler
- What is the primary method to control a servo motor?
Servo motors are controlled by PWM signal. - How many wires does a servo motor have for connections?
It has three connection wires for Positive supply V+, Negative supply or Ground V-, and Control signal. - What determines the angle of rotation in a servo motor?
The duration of the pulse applied to its Control pin determines the angle of rotation. - How often must a servo motor expect a pulse?
The servo motor expects a pulse after every 20ms. - What pulse duration rotates the servo motor to 90 degrees?
A 5ms duration pulse can rotate it to 90 degree. - Can a servo motor rotate up to 360 degrees?
Yes, some servo motors can go up to 360 degrees depending on manufacturing. - Which components are inside a DC servo motor?
A DC servo motor consists of a DC motor, Potentiometer, Gear assembly, and Control circuit. - What is the function of the potentiometer in a servo motor?
The gear and potentiometer control the DC motor within the system.