I²C vs SPI
Today, at the low end of the communication protocols, we find I²C (for ‘Inter-Integrated Circuit’, protocol) and SPI (for ‘Serial Peripheral Interface’). Both protocols are well-suited for communications between integrated circuits, for slow communication with on-board peripherals. At the roots of these two popular protocols we find two major companies – Philips for I²C and Motorola for SPI – and two different histories about why, when and how the protocols were created.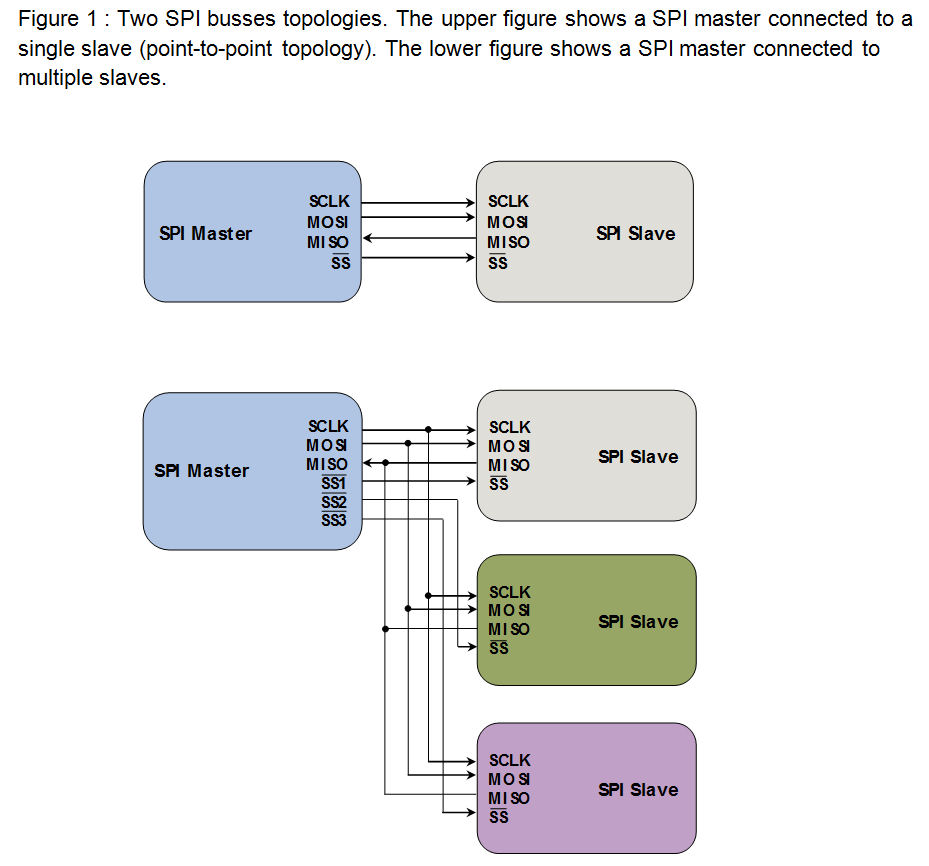
The I²C bus was developed in 1982; its original purpose was to provide an easy way to connect a CPU to peripherals chips in a TV set. Peripheral devices in embedded systems are often connected to the microcontroller as memory-mapped I/O devices. One common way to do this is connecting the peripherals to the microcontroller parallel address and data busses. This results in lots of wiring on the PCB (printed circuit board) and additional ‘glue logic’ to decode the address bus on which all the peripherals are connected. In order to spare microcontroller pins, additional logic and make the PCBs simpler – in order words, to lower the costs – Philips labs in Eindhoven (The Netherlands) invented the ‘Inter-Integrated Circuit’, IIC or I²C protocol that only requires 2 wires for connecting all the peripheral to a microcontroller. The original specification defined a bus speed of 100 kbps (kilo bits per second). The specification was reviewed several times, notably introducing the 400 kbps speed in 1995 and – since 1998, 3.4 Mbps for even faster peripherals.
It seems the Serial Peripheral Protocol (SPI) was first introduced with the first microcontroller deriving from the same architecture as the popular Motorola 68000 microprocessor, announced in 1979. SPI defined the external microcontroller bus, used to connect the microcontroller peripherals with 4 wires. Unlike I²C, it is hard to find a formal separate ‘specification’ of the SPI bus – for a detailed ‘official’ description, one has to read the microcontrollers data sheets and associated application notes.
SPI
SPI is quite straightforward – it defines features any digital electronic engineer would think of if it were to quickly define a way to communicate between 2 digital devices. SPI is a protocol on 4 signal lines (please refer to figure 1):
– A clock signal named SCLK, sent from the bus master to all slaves; all the SPI signals are synchronous to this clock signal;
– A slave select signal for each slave, SSn, used to select the slave the master communicates with;
– A data line from the master to the slaves, named MOSI (Master Out-Slave In)
– A data line from the slaves to the master, named MISO (Master In-Slave Out).
For more detail: Introduction to I²C and SPI protocols