Summary of Controlling DC motor with AVR ATtiny13 PWM and ADC Project
The article demonstrates using an ATtiny13 8-bit microcontroller to control a DC fan speed via PWM and ADC. A 10K trimpot provides an ADC input to vary PWM duty on OC0A, driving a TIP120 Darlington transistor to power a 12V fan. A switch toggles motor on/off and an LED blinks inversely with fan speed. The project uses AVR assembler to fit code in 1K flash and configures ADC, PWM, I/O, and simple debounce and delay routines.
Parts used in the ATtiny13 Fan Controller:
- AVR ATtiny13 microcontroller
- TIP120 Darlington pair transistor
- 12 Volt DC motor (computer cooling fan)
- 10K trimpot
- 3 Resistors: 2K7, 10K (two pieces), 300 Ohm
- 2 Capacitors: 100nF and 10nF
- 1 Diode: 1N4001
- 1 LED
- Switch S1
- AVRJazz Tiny2313 programmer board (from ermicro)
- OvrOspII programmer software (from Mike Henning)
- Atmel AVR Studio 4 (IDE)
It’s interesting to explore what we can do with this tiny 8 pins; 8-bit microcontroller. The ATtiny13 is the smallest and cheapest Atmel AVR 8-bit microcontroller families but yet, it’s loaded with sophisticated peripherals such as two 8-bit PWM channels and 4 channels 10-bit ADC. Although the memory is quite small; 1 K flash, 64 SRAM and 64 EEPROM but this more the adequate for most PWM and ADC application, if you need more memory, bellow is the list of other Atmel AVR 8 pins microcontrollers which have compatible pins with ATtiny13 microcontroller.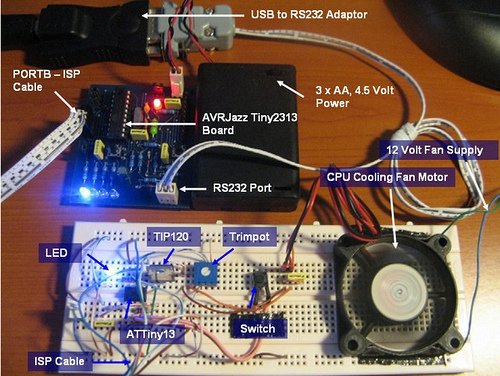
In order to demonstrate the ATtiny13 microcontroller capabilities using both PWM and ADC, I decided to use it for controlling the motor speed, after searching for the right motor for this project, finally I’ve found a microprocessor cooling fan from my old Intel Celeron computer; so I think this is a perfect motor for this project. By connecting it to the TIP120 Darlington pair transistor and to the ATtiny13 OC0A output we could easily controlling this fan speed using PWM, bellow is the complete schema for this project: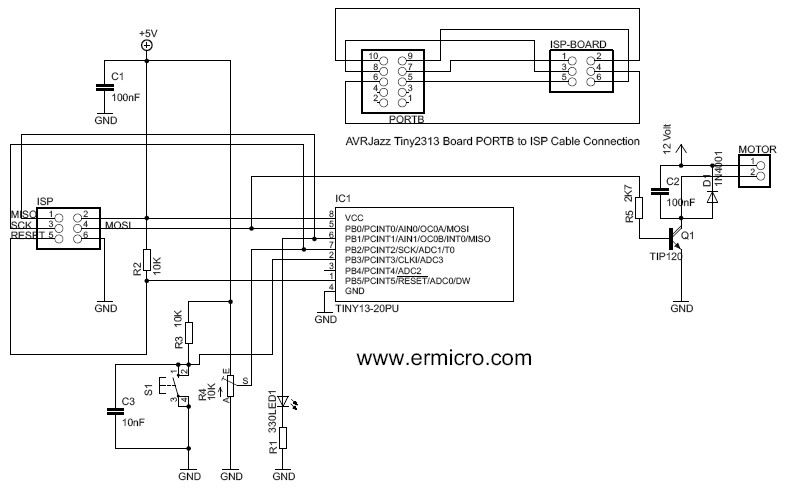
The 10K trimpot is used as an input for ADC which connected to the ADC1 input on the ATtiny13 (PIN 7) and to make it little bit more interesting I added the switch (S1) for switching the fan on/off and LED for the program life beacon, this LED will blink according to the PWM value passed to the fan, if the fan rotate faster the LED will blink slowly, but when the fan rotate slower the LED will blink faster. The fan speed is controlled by the trimpot which works as a voltage divider that supply the variable voltage to the ATtiny13 analog input.
The following is the list of hardware and software I use in this project:
- 3 Resistors: 2K7, 10K (2 pieces), 300 Ohm
- 1 Trimport: 10K
- 2 Capactors: 100nF, 1 capacitor: 10nF
- 1 Diode: 1N4001
- 1 LED
- AVR ATtiny13 microcontroller
- 1 TIP 120 Darlington pair transistor
- One 12 Volt DC motor
- AVRJazz Tiny2313 board as the programmer board from ermicro
- OvrOspII programmer software from Mike Henning
- Atmel AVR Studio 4 for the coding, compiling and debugging environment
The Tiny Code
To program the ATtiny13; this time I choose to use AVR’s assembler instead of C, because I just want to make sure that everything will feed into this tiny 1K flash boundary and just curiously how big this code will be; Ok let’s take a look in this assembler code bellow:
;********************************************************************* ; Program : t13pwm.asm ; Description : Tiny13 Fast PWM and ADC Fan Controller ; Last Updated : 15 December 2008 ; Author : RWB ; IDE/Compiler : Atmel AVR Studio 4.14 ; Programmer : AvrOspII v5.47 from Mike Henning ; : AVRJazz Tiny2313 Board ;********************************************************************* .include "tn13def.inc"
; The Tiny13 Default Frequency Clock .equ F_CPU = 9600000
.cseg
; Start on the flash ram's address 0 .org 0 main: ldi R24,RAMEND ; Initial Stack Pointer out SPL,R24 ; SP = RAMEND
; Initial I/O
ldi R16,0b00010011 ; Set PB0=Output, PB1=Output, PB2=Input, PB3=Input, PB4=Output
out DDRB,R16 ; DDRB=0x13
; Initial ADC
ldi R16,0b10000110
out ADCSRA,R16 ; Turn On the ADC, with prescale 64
ldi R16,0b00000000
out ADCSRB,R16 ; Free running mode
ldi R16,0b01100001
out ADMUX,R16 ; Internal Reference 1.1 Volt,Left Adjust, Channel: PB2 (ADC1)
ldi R16,0b00000100 ; Disable Digital Input on PB2
out DIDR0,R16
; Initial PWM
ldi R16,0b10000011
out TCCR0A,R16 ; Fast PWM Mode, Clear on OC0A
ldi R16,0b00000100
out TCCR0B,R16 ; Used fclk/256 prescale
; Initial the Button Flag and PORTB
ldi R17,0 ; Initial Button Flag
out PORTB,R17
lb_00: sbic PINB,PB3 ; if (PB3 == 0)
rjmp lb_20 ; else goto lb_20
ldi R19,5 ; Use delay for simple debounce
rcall delay_func
sbic PINB,PB3 ; if (PB3 == 0), read again
rjmp lb_20 ; else goto lb_20
cpi R17,1 ; Process if button pressed
brne lb_10 ; if (R17 != 1) goto lb_10
ldi R17,0 ; else R17=0
ldi R16,0 ; Disable PWM Clock
out TCCR0A,R16 ; TCCR0A = 0
out TCCR0B,R16 ; TCCR0B = 0
cbi PORTB,PB0 ; Turn off Motor
cbi PORTB,PB1 ; Turn off LED
rjmp lb_20
lb_10: ldi R17,1 ; R17=1
ldi R16,0b10000011
out TCCR0A,R16 ; Fast PWM Mode, Clear on OCR0A
ldi R16,0b00000100
out TCCR0B,R16 ; Used fclk/256 prescale
sbi PORTB,PB1 ; Turn on LED
lb_20: cpi R17,1 ; if (R17 != 1)
brne lb_40 ; goto lb_50
;
sbi ADCSRA,ADSC ; Start ADC conversion
lb_30: sbic ADCSRA,ADSC ; while (ADCSRA & (1<<ADSC))
rjmp lb_30
in R16,ADCH ; Read the result Ignore the last 2 bits in ADCL
out OCR0A,R16 ; OCR0A = R16
cbi PORTB,PB1 ; Turn off LED
mov R19,R16
rcall delay_func ; Call Delay Function Parameter R19
sbi PORTB,PB1 ; Turn on LED
lb_40: mov R19,R16
rcall delay_func ; Call Delay Function Parameter R19
rjmp lb_00
; Simple Delay Function
delay_func:
delay0: ldi R20,25 ; R20 = 25
delay1: ldi R21,255 ; R21 = 255
delay2: dec R21 ; Decrease R21
brne delay2 ; if (R20 != 0) goto delay2 label
dec R20 ; Decrease R20
brne delay1 ; if (R20 != 0) goto delay1 label
dec R19 ; Decrease R19
brne delay0 ; if (R19 != 0) goto delay0 label
ret ; Return to the caller
.exit
The first statement groups in the main area is to initial the stack, the stack use the microcontroller SRAM memory and we put the stack pointer to the end of 64 byte boundary (RAMED), the next statement groups is to initial the data direction register on the PORTB and make the direction as the following tables:
For more detail: Controlling DC motor with AVR ATtiny13 PWM and ADC Project
- What microcontroller is used in this project?
The ATtiny13 8-bit microcontroller is used. - How is the fan speed controlled?
Fan speed is controlled by PWM generated on OC0A and driven through a TIP120 transistor, with duty set by the ADC reading from the 10K trimpot. - Which ADC input is used for the trimpot?
The trimpot is connected to ADC1, which is on PB2 (pin 7) of the ATtiny13. - How does the LED indicate PWM activity?
The LED blinks according to the PWM value: faster blinking at lower fan speed and slower blinking at higher fan speed. - What is the purpose of the switch S1?
Switch S1 toggles the fan on and off. - Which programmer and software are used to program the ATtiny13?
The AVRJazz Tiny2313 board is used as the programmer and OvrOspII is the programmer software; Atmel AVR Studio 4 is used for coding and compiling. - What PWM mode and prescaler are configured in the code?
Fast PWM mode is configured and a clock prescale of fclk/256 is used. - Which voltage reference is used for the ADC?
The internal 1.1 Volt reference is selected in the ADC configuration. - Why was assembler chosen over C for this project?
Assembler was chosen to ensure the code fits within the ATtiny13s 1K flash memory and to measure code size precisely. - How is ADC result used to set PWM output?
The code reads ADCH (left-adjusted ADC) into a register and writes it directly to OCR0A to set the PWM duty cycle.