Summary of Drive a stepper motor with acceleration and deceleration using an Allegro driver on ATmega8
This article explains how to drive bipolar stepper motors using the Allegro A3967 (EasyDriver) or A4988 with an ATmega8 microcontroller. The library supports features like speed control, acceleration ramps, and precise step counting. It highlights that microstepping improves accuracy while reducing torque and emphasizes the need for steady pulse generation for constant speeds.
Parts used in Stepper Motor Drive Project:
- Stepper motor
- Allegro A3967 driver
- ATmega8 microcontroller
- Allegro A4988 driver
- Dual H-bridge driver
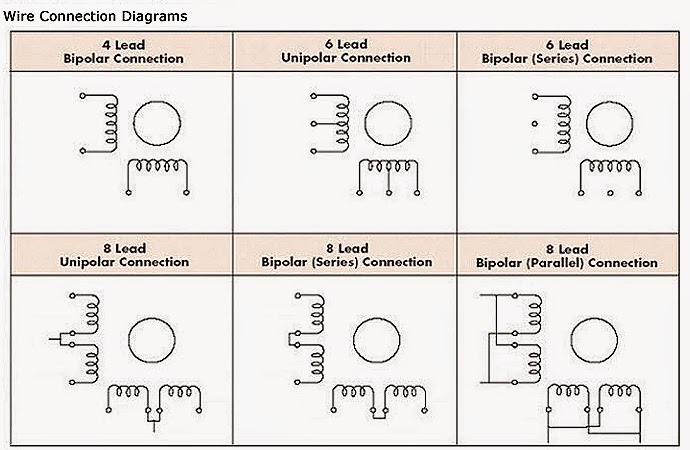
The stepper motor is an electromagnetic device that converts digital pulses into mechanical shaft rotation. Most common types of stepper motor can be bipolar or unipolar, depending on the winding.
Most common types of stepper motor can be bipolar or unipolar, depending on the winding.
To make a stepper motor move, motor windings must be loaded in the correct order.
A stepper motor move at steps, it’s accuracy is usually expressed as degree per step. Microstepping is a method by witch motor accuracy can be increased at the expense of the motor torque.
Stepper motor can be driven using straight dual H-bridge driver. However there is a family of IC expressily built to drive stepper motor, they incorporate microstepping technique and are driven by a built-in translator, so that each received pulse is translated to a motor step.
Allegro MicroSystems offers a wide range of bipolar stepper motor driver.
This library drive a stepper motor using the Allegro A3967 (EasyDriver) on ATmega8. It will also work on the Allegro a4988, and other type of motor driver controlled by the number of pulse received.
It features:
- direction changing
- speed changing
- acceleration and deceleration
- multiple motor driving
- stop spinning after number of step, or continuos spinning mode
-
What is a stepper motor?
A stepper motor is an electromagnetic device that converts digital pulses into mechanical shaft rotation. -
How can motor accuracy be increased?
Accuracy can be increased using microstepping, though this comes at the expense of motor torque. -
Which drivers are compatible with this library?
The library works with the Allegro A3967 EasyDriver, the Allegro A4988, and other pulse-controlled drivers. -
What happens if pulses are not generated at a steady rate?
If pulses are not steady, an acceleration or deceleration ramp must be implemented to rotate the motor correctly. -
Does the library support changing motor direction?
Yes, the library features include direction changing capability. -
Can multiple motors be driven simultaneously?
Yes, the system supports multiple motor driving.