Neural net robot using ATMega32
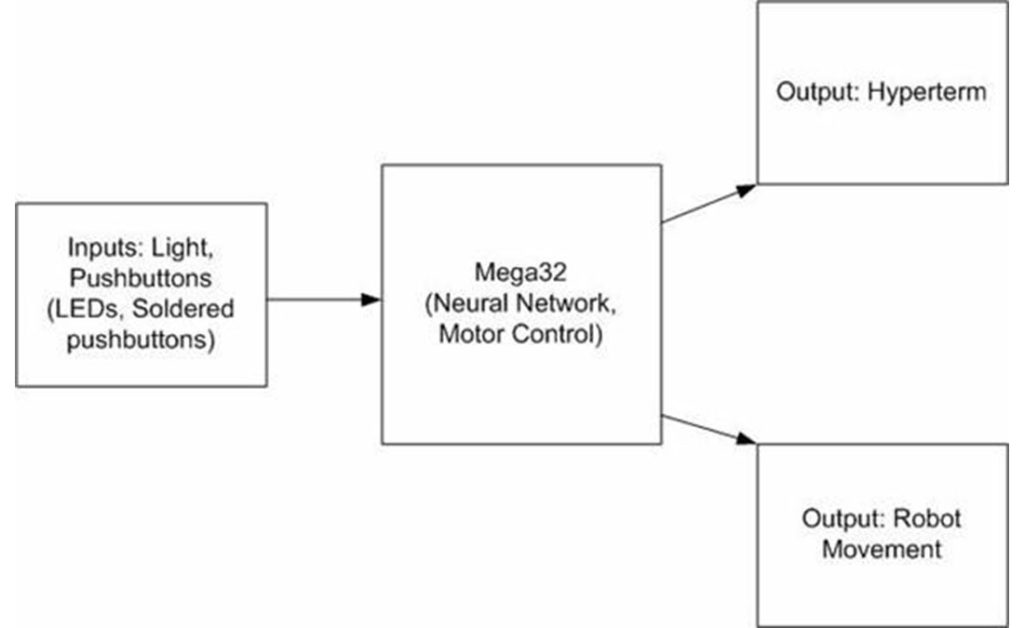
Introduction Our project consisted of an elementary eight neuron network that used Hebbian Learning to train a robot to respond intelligently to input light stimuli. First, we decided upon a task that would accurately denote Hebbian learning. One of the most common examples of conditional learning such as Hebbian learning is seen in Pavlovs experiment […]
Neural net robot using ATMega32 Read More »