Summary of servo motor controller
This article explains how to build a servo motor controller using an ATMEGA328 board. The system controls the servo's position either through software-based sweeping or via a potentiometer input. Control is achieved by sending specific pulse widths every 20 milliseconds: 1 millisecond sets the angle to zero, 1.5 milliseconds centers it, and 2 milliseconds moves it to 180 degrees.
Parts used in the Servo Motor Controller:
- Servo motor
- ATMEGA328 board
- Potentiometer
- Software for control
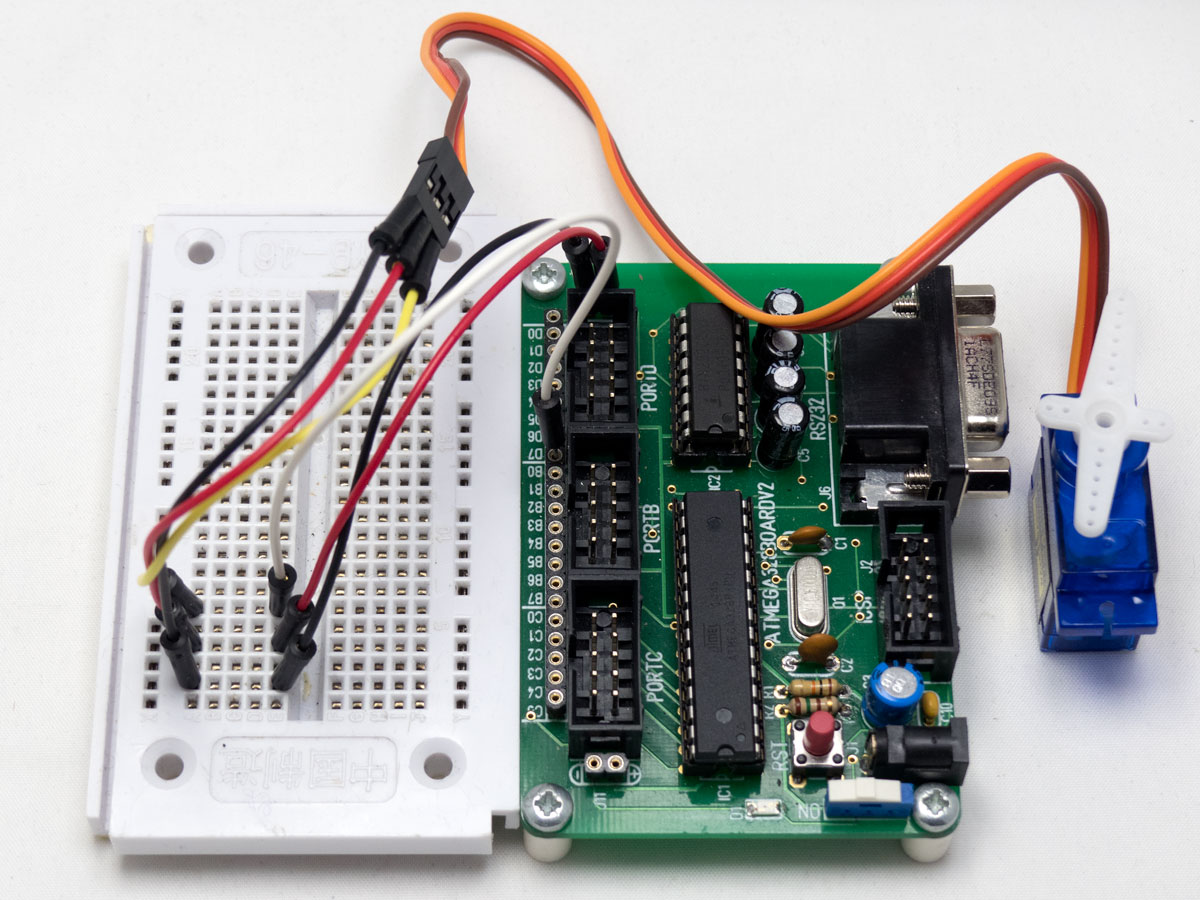
In ths project you can learn how to build a servo controleer motor with the ATMEGA328 board. The position of the servo motor is controlled by the software (sweep back and forth) or by a potentiometer.
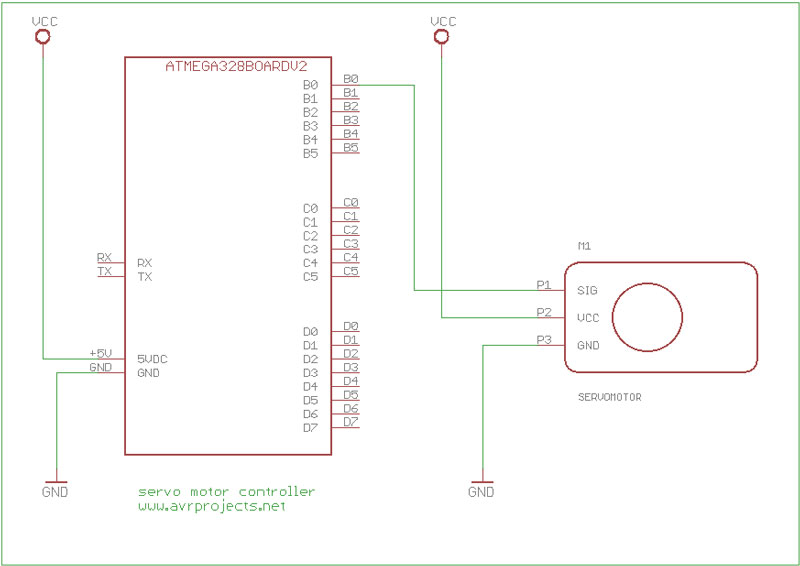
The position of the servo motor is set by the length of a pulse. The servo expects to receive a pulse roughly every 20 milliseconds. If that pulse is high for 1 millisecond, then the servo angle will be zero, if it is 1.5 milliseconds, then it will be at its centre position and if it is 2 milliseconds it will be at 180 degrees.
Schematic and board layout for sweep function
for more detail:servo motor controller
- How is the position of the servo motor controlled?
The position is controlled by the software using a sweep function or by a potentiometer. - What determines the angle of the servo motor?
The angle is determined by the length of the pulse sent to the servo. - How often does the servo expect to receive a pulse?
The servo expects to receive a pulse roughly every 20 milliseconds. - What happens if the pulse is high for 1 millisecond?
If the pulse is high for 1 millisecond, the servo angle will be zero. - At what pulse width does the servo reach its center position?
The servo reaches its center position when the pulse is 1.5 milliseconds long. - What pulse width corresponds to 180 degrees?
A pulse width of 2 milliseconds places the servo at 180 degrees. - Can the servo controller work without a potentiometer?
Yes, the position can be set by software to sweep back and forth.