Phased Array Speaker System
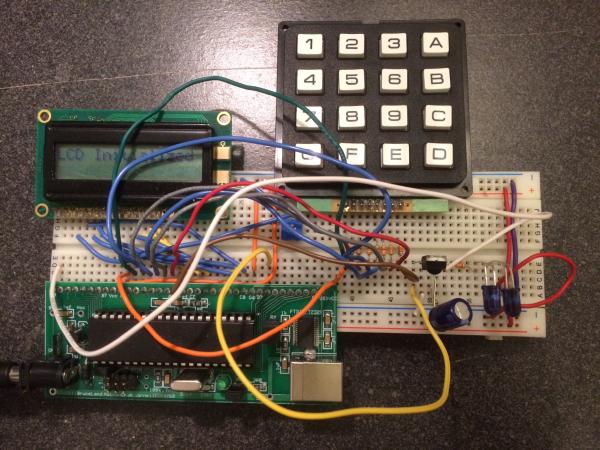
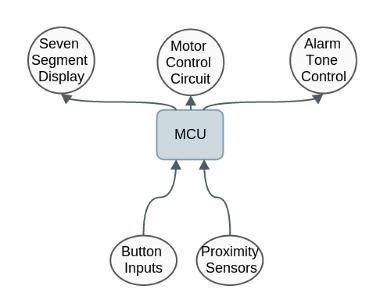
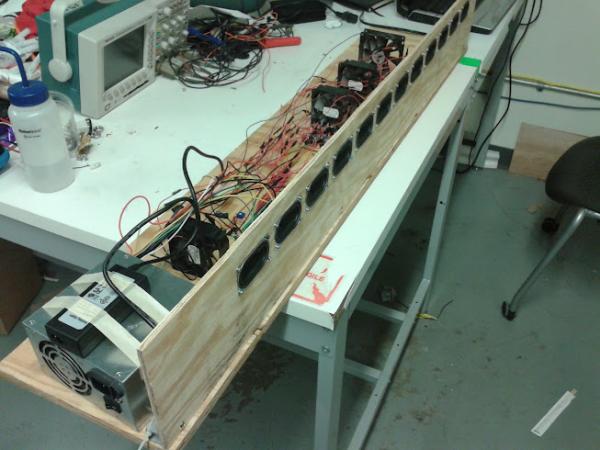
Introduction For our ECE 4760 final project, we designed and built an array of 12 independently-controllable speakers to implement an acoustic phased-array system. The system samples a standard audio input signal at approximately 44.1 kHz, and then outputs this signal to each of 12 speakers, each with a variable delay. The idea behind a phased-array […]